Пересечение Луч-Треугольник C++
Я проверяю, пересекается ли луч с треугольником, поэтому в настоящее время я использую следующий код, чтобы проверить, существует ли пересечение между указанным лучом, который в этой точке имеет направление на середину случайного треугольника:
Ray<float> *ray = new Ray<float>(Vec3<float>(0), chosenTriangle->GetTriangleMidpoint());
Вдоль стороны находится объект Vec3, который я использую для хранения векторных операций:
template<typename T>
class Vec3
{
public:
T x, y, z;
Vec3() : x(T(0)), y(T(0)), z(T(0)) { }
Vec3(T xx) : x(xx), y(xx), z(xx) { }
Vec3(T xx, T yy, T zz) : x(xx), y(yy), z(zz) {}
Vec3& normalize()
{
T nor2 = length2();
if (nor2 > 0) {
T invNor = 1 / sqrt(nor2);
x *= invNor, y *= invNor, z *= invNor;
}
return *this;
}
Vec3<T> operator * (const T &f) const { return Vec3<T>(x * f, y * f, z * f); }
Vec3<T> operator * (const Vec3<T> &v) const { return Vec3<T>(x * v.x, y * v.y, z * v.z); }
T dot(const Vec3<T> &v) const { return x * v.x + y * v.y + z * v.z; }
Vec3<T> operator - (const Vec3<T> &v) const { return Vec3<T>(x - v.x, y - v.y, z - v.z); }
Vec3<T> operator + (const Vec3<T> &v) const { return Vec3<T>(x + v.x, y + v.y, z + v.z); }
bool operator == (const Vec3<T> &v) { return x == v.x && y == v.y && z == v.z; }
Vec3<T> operator - () const { return Vec3<T>(-x, -y, -z); }
T length2() const { return x * x + y * y + z * z; }
T length() const { return sqrt(length2()); }
Vec3<T> CrossProduct(Vec3<T> other)
{
return Vec3<T>(y*other.z - other.y*z, x*other.z - z*other.x, x*other.y - y*other.x);
}
friend std::ostream & operator << (std::ostream &os, const Vec3<T> &v)
{
os << "[" << v.x << " " << v.y << " " << v.z << "]";
return os;
}
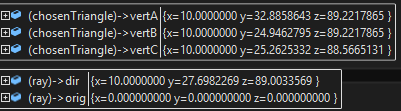
выбранный треугольник и луч имеют следующие значения, где vertA, vertB и vertC являются вершинами треугольника и находятся в объекте, который представляет треугольник.
и код, который вычисляет, если есть пересечение между указанным лучом и пересечением, является следующим, этот код находится внутри метода объекта треугольника, где vertA, vertB и vertC являются глобальными переменными.
bool CheckRayIntersection(Vec3<T> &o, Vec3<T> &d)
{
Vec3<T> e1 = vertB - vertA;
Vec3<T> e2 = vertC - vertA;
Vec3<T> p = d.CrossProduct(e2);
T a = e1.dot(p);
if(a == 0)
return false;
float f = 1.0f/a;
Vec3<T> s = o - vertA;
T u = f * s.dot(p);
if(u < 0.0f || u > 1.0f)
return false;
Vec3<T> q = s.CrossProduct(e1);
T v = f * d.dot(q);
if(v < 0.0f || u+v > 1.0f)
return false;
T t = f * e2.dot(q);
return (t >= 0);
}
Я все еще получаю ложное значение, возвращаемое функцией, но я предполагаю, что оно должно возвращать истину, поскольку вектор, проходящий через середину треугольника, должен пересекать треугольник в некоторой точке. Кто-нибудь может просветить меня, что не так в моем коде? или если тест хорош, чтобы вернуть ложный
2 ответа
С вашими данными мне удалось получить согласованные результаты, нормализовав направление луча (это единственное очевидное изменение в коде).
Вот реализация кода (я использовал документ в качестве справочного материала, и он не очень оптимизирован):
struct quickVect
{
float x,y,z;
float l;
};
#define DOT(v1,v2) (v1.x*v2.x + v1.y*v2.y+v1.z*v2.z)
#define CROSS(rez,v1,v2) \
rez.x = v1.y*v2.z - v1.z*v2.y; \
rez.y = v1.z*v2.x - v1.x*v2.z; \
rez.z = v1.x*v2.y - v1.y*v2.x;
#define SUB(rez,v1,v2) \
rez.x = v1.x-v2.x; \
rez.y = v1.y-v2.y; \
rez.z = v1.z-v2.z;
#define LENGTH(v) (sqrtf(v.x* v.x + v.y*v.y + v.z*v.z))
#define NORMALIZE(v) \
v.l = LENGTH(v); \
v.x = v.x / v.l; \
v.y = v.y / v.l; \
v.z = v.z / v.l;
#define EPSILON 0.000001f
//#define TEST_CULL
bool testIntersection(quickVect& v1, quickVect& v2, quickVect& v3, quickVect& orig,quickVect& dir)
{
quickVect e1,e2,pvec,qvec,tvec;
SUB(e1,v2,v1);
SUB(e2,v3,v1);
CROSS(pvec,dir,e2);
NORMALIZE(dir);
//NORMALIZE(pvec);
float det = DOT(pvec,e1);
#ifdef TEST_CULL
if (det <EPSILON)
{
return false;
}
SUB(tvec,orig,v1);
float u = DOT(tvec,pvec);
if (u < 0.0 || u > det)
{
return false;
}
CROSS(qvec,tvec,e1);
float v = DOT(dir,qvec);
if (v < 0.0f || v + u > det)
{
return false;
}
#else
if (det < EPSILON && det > -EPSILON )
{
return false;
}
float invDet = 1.0f / det;
SUB(tvec,orig,v1);
// NORMALIZE(tvec);
float u = invDet * DOT(tvec,pvec);
if (u <0.0f || u > 1.0f)
{
return false;
}
CROSS(qvec,tvec,e1);
// NORMALIZE(qvec);
float v = invDet* DOT(qvec,dir);
if (v < 0.0f || u+v > 1.0f)
{
return false;
}
#endif
return true;
}
Прямой перевод ответа MichaelCMS для использования с glm.
// must normalize direction of ray
bool intersectRayTri(Tri& tri, glm::vec3 o, glm::vec3 n) {
glm::vec3 e1, e2, pvec, qvec, tvec;
e1 = tri.v2 - tri.v1;
e2 = tri.v3 - tri.v1;
pvec = glm::cross(n, e2);
n = glm::normalize(n);
//NORMALIZE(pvec);
float det = glm::dot(pvec, e1);
if (det != 0)
{
float invDet = 1.0f / det;
tvec = o - tri.v1;
// NORMALIZE(tvec);
float u = invDet * glm::dot(tvec, pvec);
if (u < 0.0f || u > 1.0f)
{
return false;
}
qvec = glm::cross(tvec, e1);
// NORMALIZE(qvec);
float v = invDet * glm::dot(qvec, n);
if (v < 0.0f || u + v > 1.0f)
{
return false;
}
}
else return false;
return true; // det != 0 and all tests for false intersection fail
}