Вычислить момент инерции заданного произвольного выпуклого 2D-многоугольника
Я часами изучал этот вопрос и по какой-то причине не смог найти решение.
Учитывая выпуклый многоугольник, который определяется как массив точек по часовой стрелке вокруг центроида многоугольника, как я могу рассчитать момент инерции многоугольника?
Я смог найти уравнение для различных форм, таких как прямоугольники или круги, но не для произвольного выпуклого многоугольника.
Например, момент инерции прямоугольника, вращающегося вокруг его центроида с массой m, высотой h и шириной w, рассчитывается как:

Я ищу похожую формулу / алгоритм, но вместо этого выпуклый многоугольник.
1 ответ
Существует метод анализа двумерного многоугольника с использованием векторной алгебры, который, на мой взгляд, проще реализовать программно, чем методы, основанные на тригонометрии.
Каждый Vector количество состоит из двух компонентов .x а также .y а также методы векторной алгебры векторов, в том числе для точечных и перекрестных произведений
add(a,b) = [a.x+b.x, a.y+b.y] // a+b = add(a,b)
scale(f,x) = [f*a.x, f*a.y] // 2*a = scale(2,a), a/3 = scale(1/3,a)
dot(a,b) = a.x*b.x + a.y*b.y // a·b = dot(a,b)
cross(a,b) = a.x*b.y - a.y*b.x // a×b = cross(a,b)
Приведенный ниже метод проходит через все стороны многоугольника и суммирует площадь, центр и момент инерции массы относительно начала координат каждого треугольника, определяемого стороной и началом. Окончательная сумма заботится о добавлении или вычитании областей вблизи или вдали от источника и дает точные результаты.
Наконец, момент массы передается от начала координат к центру масс.
polygon(Vector[] points, double depth, double density)
{
// Accumulate the following values
double area = 0.0;
double mass = 0.0;
Vector center = [0.0, 0.0];
double mmoi = 0.0;
// Take each vertex pair starting from the last-first vertex
// in order to consider all sides.
int count = points.Length;
int prev = count - 1;
for(int index=0; index<count; index++)
{
Vector a = points[prev];
Vector b = points[index];
double area_step = TriangleArea(a,b);
double mass_step = density * area_step * depth;
Vector center_step = TriangleCenter(a,b);
double mmoi_step = TriangleMmoi(a,b, mass_step);
area += area_step;
center = (mass*center + mass_step*center_step)/(mass+mass_step);
mass += mass_step;
mmoi += mmoi_step;
prev = index;
}
// Transfer mass moment of inertia from the origin to the center of mass
mmoi -= mass*dot(center,center);
// use area, mass, center and mmoi
}
double TriangleArea(Vector a, Vector b)
{
return cross(a,b)/2;
}
double TriangleCenter(Vector a, Vector b)
{
return (a+b)/3;
{
double TriangleMmoi(Vector a, Vector b, double triangleMass)
{
return triangleMass/6*(dot(a,a)+dot(b.b)+dot(a.b));
}
Вышеупомянутый процесс аналогичен описанному в этом ответе. Более подробная информация включена в связанный ответ.
Ниже приводится c# реализация вышеуказанного, но с указанием массы, а не плотности и толщины.
public static RigidBody2 FromShape(double mass, params Vector2[] polygon)
{
double area = 0;
Vector2 center = Vector2.Zero;
double mmoi = 0;
int prev = polygon.Length-1;
for (int index = 0; index < polygon.Length; index++)
{
var a = polygon[prev];
var b = polygon[index];
var area_step = Vector2.Cross(a, b)/2;
var center_step = (a+b)/3;
var mmoi_step = area_step*(Vector2.Dot(a, a)+Vector2.Dot(b, b)+Vector2.Dot(a, b))/6;
center = (center*area + center_step * area_step)/(area + area_step);
area += area_step;
mmoi += mmoi_step;
prev = index;
}
double density = mass/area;
mmoi *= density;
mmoi -= mass * Vector2.Dot(center, center);
return new RigidBody2(mass, mmoi, center);
}
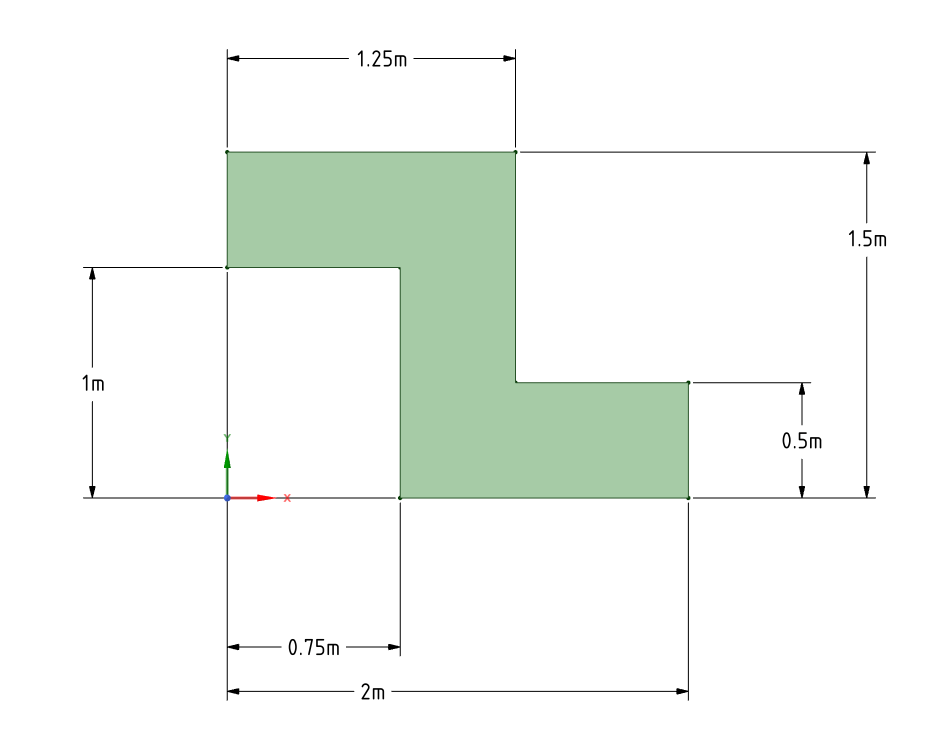
При тестировании я использовал следующую форму
и результаты center = [1.0, 0.75] а также mmoi = 787.5 соответствие с анализом, выполненным в пакете САПР
Вот модульный тест, который проверяет данные САПР:
[TestMethod, TestCategory("Linear Algebra, Planar")]
public void Geom_PlanarPolygonMass()
{
Vector2[] points = new Vector2[] {
Vector2.Cartesian(0.75, 0),
Vector2.Cartesian(2, 0),
Vector2.Cartesian(2, 0.5),
Vector2.Cartesian(1.25, 0.5),
Vector2.Cartesian(1.25, 1.5),
Vector2.Cartesian(0, 1.5),
Vector2.Cartesian(0, 1.0),
Vector2.Cartesian(0.75, 1),
};
var rg = RigidBody2.FromShape(1500, points);
Assert.AreEqual(1500, rg.Mass);
CollectionAssert.AreEqual(Vector2.Cartesian(1.0, 0.75), rg.LocalCg, AbsComparer(TinyNumber));
Assert.AreEqual(687.5, rg.LocalMmoi, DoubleEx.TinyNumber);
}
Уравнение для момента инерции довольно просто, и вы можете найти его объяснение здесь: https://en.wikipedia.org/wiki/Moment_of_inertia
Это использовалось, например, чтобы вывести уравнение, которое вы цитировали.
Как упоминал Энди Ньюман, выпуклый многоугольник можно рассматривать как состоящий из треугольников. Но суммирование их индивидуальных инерций не является решением - оно не даст правильного уравнения, которое учитывает ось вращения.
Таким образом, в основном вам нужно получить уравнение для вашего многоугольника относительно оси вращения, вокруг которой вы хотите его вращать.
Вам может пригодиться одна из следующих теорем, в зависимости от типа фигуры, которую вы имеете в виду: