Как получить доступ и использовать координаты скелета, используя OpenNI, ASUS Xtion и ROS?
Для разработки робота-последователя я использую ASUS Xtion и OpenNI. Чтобы получить как RGB-изображение, так и скелетные соединения, я использую скрипт отслеживания скелета ( https://github.com/Chaos84/skeleton_tracker). Трекер публикует соединения в "/tf", но дело в том, что я не могу использовать эти координаты соединения в своем скрипте. Я не знаю, как получить к ним доступ. Как я могу получить к ним доступ и использовать их в своем сценарии, чтобы робот двигался в соответствии с этими координатами? Благодарю.
2 ответа
Вы можете использовать другое средство обнаружения / отслеживания скелета, BodySkeletonTracker:
https://github.com/derzu/BodySkeletonTracker
Посмотрите, как это работает:
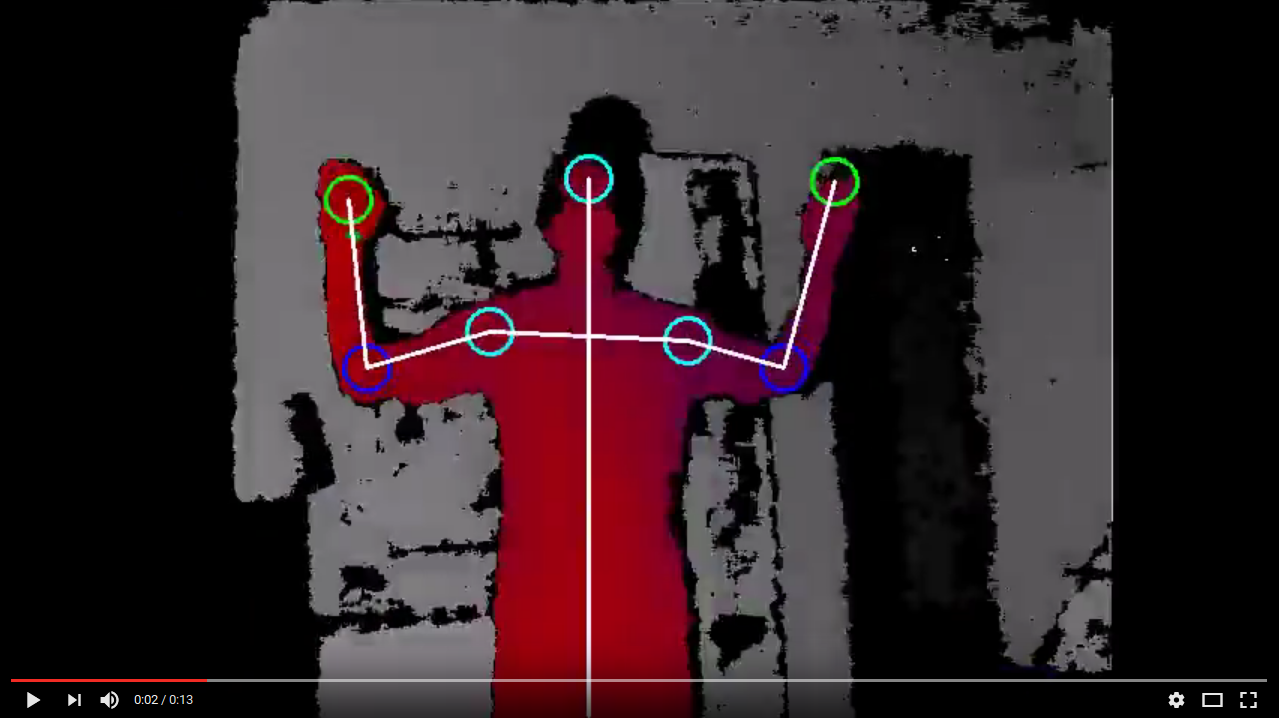
Вы можете получить точки соединения, получая объект класса SkeletonPoints.