Как я могу использовать данные глубины в cad_60
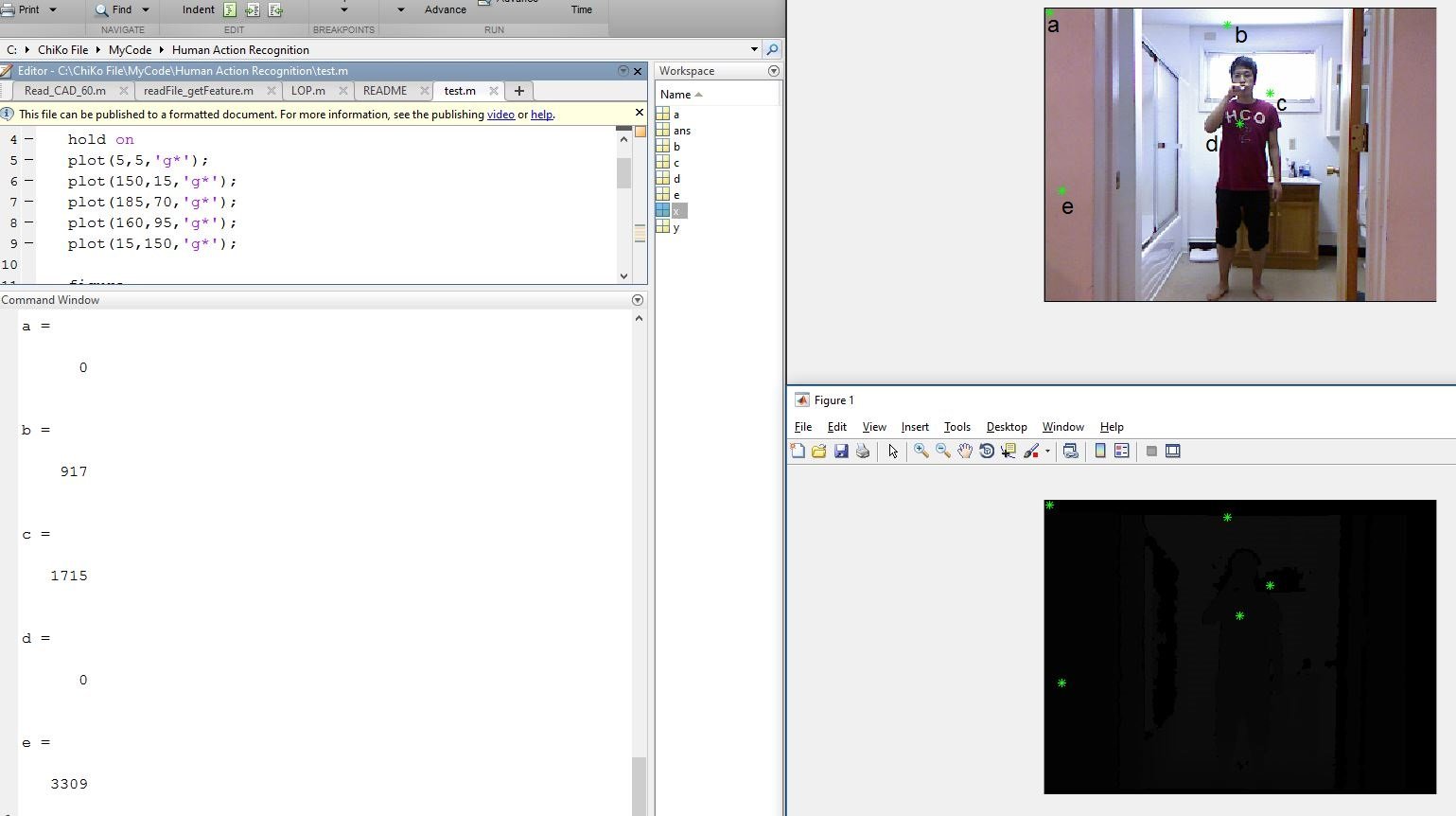
Я хочу получить расстояние от изображения глубины. У меня есть 3D-положение, и я конвертирую эту точку в 2D. Теперь я читаю эти данные координат из RGB и изображения глубины. На этой картинке я отмечаю 5 точек и вижу данные этой точки из глубины изображения.
почему эти координаты не верны?
или почему эти данные равны 0?
Как я могу получить реальные данные из глубины изображения?
1 ответ
Данные, возвращаемые Kinect, имеют 0 значений в пикселях, которые не могут быть получены для измерения глубины. Это может происходить по нескольким причинам, но особенно это происходит на отражающих поверхностях, на стекле и т. Д. Кроме того, значения по краям более подвержены ошибкам, поэтому по краям больше значений 0, чем в центре изображения.
Таким образом, (a) и (d) могут быть равны нулю, но если вы проверите соседние пиксели, будут значения глубины. (е) плохое измерение, так как оно имеет большое значение, тогда как оно ближе, чем остальные точки.
Перед сбором данных, возможно, вы можете попробовать какую-либо технику заполнения отверстий, такую как нормализация глубины ваших данных, чтобы удалить большинство нулевых значений.