Сервопривод Pymunk
Как вы реализуете "серво" сустав в Pymunk?
Я пытаюсь создать простую модель, в которой коробка сбалансирована на одной тонкой "ножке" под ней. Я смог создать коробку и присоединить ее к земле с помощью PinJoint, но, похоже, нет никакого способа контролировать угол, где соединение соединяется с коробкой. Я хочу, чтобы можно было указать угол крепления. Ни один из других суставов, кажется, не поддерживает это. Все они кажутся пассивными соединениями, за исключением соединения SimpleMotor, но даже это только вращающееся соединение, которое вы не можете контролировать.
Мне удалось что-то сложить вместе, используя PinJoint для соединения двух тонких коробок вместе на их концах, а также SimpleMotor, чтобы заставить их вращаться относительно друг друга в ответ на нажатия пользователем "вверх" и "вниз" " клавиши со стрелками. Ниже приведен код:
import sys
import pygame
from pygame.locals import USEREVENT, QUIT, KEYDOWN, KEYUP, K_s, K_r, K_q, K_ESCAPE, K_UP, K_DOWN
from pygame.color import THECOLORS
import pymunk
from pymunk import Vec2d
import pymunk.pygame_util
class Simulator(object):
def __init__(self):
self.display_flags = 0
self.display_size = (600, 600)
self.space = pymunk.Space()
self.space.gravity = (0.0, -1900.0)
self.space.damping = 0.999 # to prevent it from blowing up.
# Pymunk physics coordinates start from the lower right-hand corner of the screen.
self.ground_y = 100
ground = pymunk.Segment(self.space.static_body, (5, self.ground_y), (595, self.ground_y), 1.0)
ground.friction = 1.0
self.space.add(ground)
self.screen = None
self.draw_options = None
def reset_bodies(self):
for body in self.space.bodies:
if not hasattr(body, 'start_position'):
continue
body.position = Vec2d(body.start_position)
body.force = 0, 0
body.torque = 0
body.velocity = 0, 0
body.angular_velocity = 0
body.angle = body.start_angle
def draw(self):
### Clear the screen
self.screen.fill(THECOLORS["white"])
### Draw space
self.space.debug_draw(self.draw_options)
### All done, lets flip the display
pygame.display.flip()
def main(self):
pygame.init()
self.screen = pygame.display.set_mode(self.display_size, self.display_flags)
width, height = self.screen.get_size()
self.draw_options = pymunk.pygame_util.DrawOptions(self.screen)
def to_pygame(p):
"""Small hack to convert pymunk to pygame coordinates"""
return int(p.x), int(-p.y+height)
def from_pygame(p):
return to_pygame(p)
clock = pygame.time.Clock()
running = True
font = pygame.font.Font(None, 16)
# Create the torso box.
box_width = 50
box_height = 100
leg_length = 100
mass = 1
points = [(-100, -1), (0, -1), (0, 1), (-100, 1)]
moment = pymunk.moment_for_poly(mass, points)
body1 = pymunk.Body(mass, moment)
# body1.position = (0, 0)
body1.position = (self.display_size[0]/2, self.ground_y+100)
body1.start_position = Vec2d(body1.position)
body1.start_angle = body1.angle
shape1 = pymunk.Poly(body1, points)
shape1.friction = 0.8
self.space.add(body1, shape1)
# Create bar 2 extending from the right to the origin.
mass = 1
points = [(100, -1), (0, -1), (0, 1), (100, 1)]
moment = pymunk.moment_for_poly(mass, points)
body2 = pymunk.Body(mass, moment)
# body2.position = (0, 0)
body2.position = (self.display_size[0]/2, self.ground_y+100)
body2.start_position = Vec2d(body2.position)
body2.start_angle = body2.angle
shape2 = pymunk.Poly(body2, points)
shape2.friction = 0.8
self.space.add(body2, shape2)
# Link bars together at end.
pj = pymunk.PinJoint(body1, body2, (0, 0), (0, 0))
self.space.add(pj)
motor_joint = pymunk.SimpleMotor(body1, body2, 0)
self.space.add(motor_joint)
pygame.time.set_timer(USEREVENT+1, 70000) # apply force
pygame.time.set_timer(USEREVENT+2, 120000) # reset
pygame.event.post(pygame.event.Event(USEREVENT+1))
pygame.mouse.set_visible(False)
simulate = False
while running:
for event in pygame.event.get():
if event.type == QUIT or (event.type == KEYDOWN and event.key in (K_q, K_ESCAPE)):
#running = False
sys.exit(0)
elif event.type == KEYDOWN and event.key == K_s:
# Start/stop simulation.
simulate = not simulate
elif event.type == KEYDOWN and event.key == K_r:
# Reset.
# simulate = False
self.reset_bodies()
elif event.type == KEYDOWN and event.key == K_UP:
motor_joint.rate = 1
elif event.type == KEYDOWN and event.key == K_DOWN:
motor_joint.rate = -1
elif event.type == KEYUP:
motor_joint.rate = 0
self.draw()
### Update physics
fps = 50
iterations = 25
dt = 1.0/float(fps)/float(iterations)
if simulate:
for x in range(iterations): # 10 iterations to get a more stable simulation
self.space.step(dt)
pygame.display.flip()
clock.tick(fps)
if __name__ == '__main__':
sim = Simulator()
sim.main()
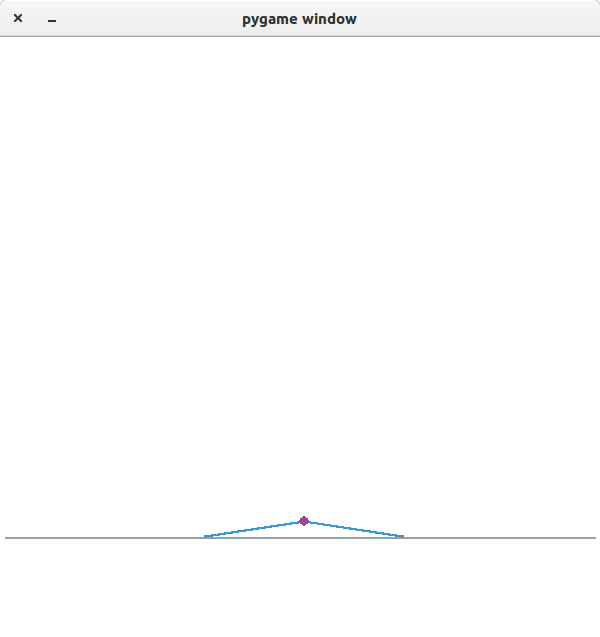
Тем не менее, поведение несколько странно. Когда вы нажимаете вверх / вниз, это динамически устанавливает скорость на соединении SimpleMotor, вызывая поворот двух коробок в их общем "серво соединении", например:
за исключением того, что со временем два стержня перевернутся на одном конце, и в противном случае бросят вызов гравитации и будут выглядеть так:
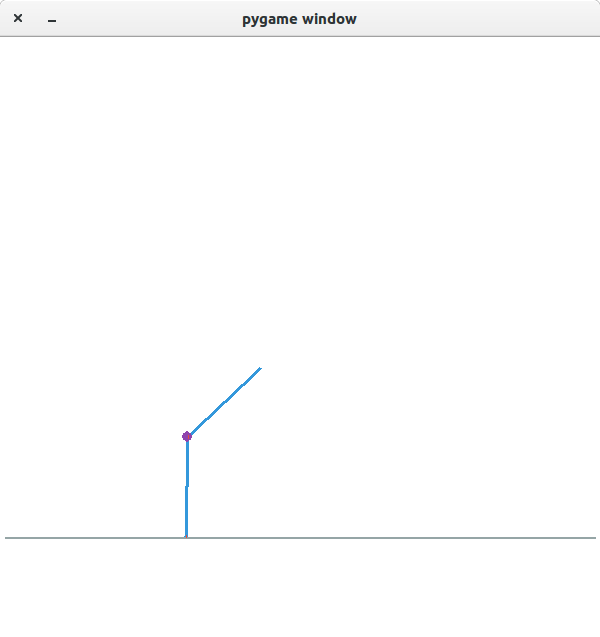
Почему это? Я все еще довольно плохо знаком с физическим симулятором Pymunk/Chipmunk, поэтому я не уверен, что правильно использую эти соединения.
1 ответ
Пара вещей, которые могут вызвать проблемы:
Игнорировать столкновения между двумя фигурами. Так как соединение двигателя и пальца объединяет их, но разрешение столкновений отталкивает их друг от друга, могут происходить странные вещи. Вы можете сделать это, установив две фигуры в одну группу:
shape_filter = pymunk.ShapeFilter(group=1) shape1.filter = shape_filter shape2.filter = shape_filterЦентр тяжести для двух фигур находится на своих концах, а не в центре. Попробуйте переместить его в центр (
[(-50, -1), (50, -1), (50, 1), (-50, 1)]).
(В этом случае я думаю, что 1 достаточно для решения проблемы, но я добавил 2, если вы заметили другие странные вещи)