Как смоделировать временную реакцию передаточной функции системы с помощью python-control (проблема IVP)?
Я пытаюсь продемонстрировать, как "решать" (моделировать решение) задач начального значения дифференциального уравнения (IVP), используя как определение передаточной функции системы, так и
python-controlмодуль. Дело в том, что я новичок в вопросах контроля.
У меня в качестве примера есть простой дифференциал:
y'' - 4y' + 13y = 0, с этими начальными условиями:
y(0) = 1 и
y'(0) = 0.
Я добиваюсь этой передаточной функции вручную:
Y(s) = (s - 4)/(s^2 - 4*s + 13).
Итак, на Python я пишу этот небольшой фрагмент кода (обратите внимание, что
y_ansэто ответ этой дифференциальной IVP, как показано здесь):
import numpy as np
import control as ctl
import matplotlib.pyplot as plt
t = np.linspace(0., 1.5, 100)
sys = ctl.tf([1.,-4.],[1.,-4.,13.])
T, yout, _ = ctl.forced_response(sys, T=t, X0=[1, 0])
y_ans = lambda x: 1/3*np.exp(2*x)*(3*np.cos(3*x) - 2*np.sin(3*x))
plt.plot(t, y_ans(t), '-.', color='gray', alpha=0.5, linewidth=3, label='correct answer')
plt.plot(T, yout, 'r', label='simulated')
plt.legend()
Этот код дает мне этот график:
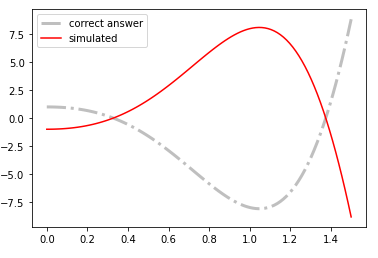
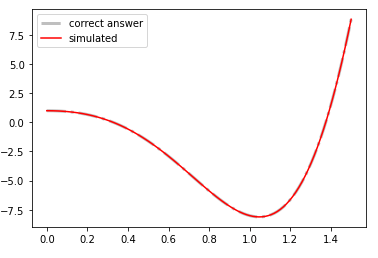
Но когда я вставляю отрицательный знак перед
yout, У меня есть совпадение, как хотелось бы:
plt.plot(T, -yout, 'r', label='simulated') ### yout with negative sign
Что я делаю неправильно? Документация по Python-control мне не очень понятна. Кроме того, я не знаю, насколько моя интерпретация
X0 параметр для
control.forced_responseверно. Можно ли сделать это так, как я задумал?
Любой, кто может пролить свет на эту тему, может внести свой вклад.
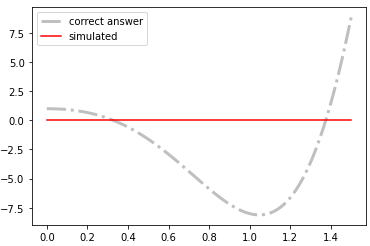
РЕДАКТИРОВАТЬ
Настройка
X0 = [0,0] дает мне этот график:
2 ответа
Я думаю, что лучше всего здесь преобразовать вашу систему в пространство состояний и посмотреть, что происходит (существует множество возможных представлений пространства состояний):
sys_tf = ctl.tf([1.,-4.],[1.,-4.,13.])
sys_ss = ctl.tf2ss(sys_tf)
print(sys_ss)
Выход:
A = [[ 4.00000000e+00 1.30000000e+00]
[-1.00000000e+01 1.33226763e-15]]
B = [[-1.]
[ 0.]]
C = [[-1. -0.4]]
D = [[0.]]
Мы хотим найти
x(0) такой, что
y(0) = Cx(0) = 1 и
y'(0) = CAx(0) = 0.
Мы можем либо записать эти уравнения и решить их вручную, либо использовать линейную алгебру:
A = np.vstack([sys_ss.C, sys_ss.C @ sys_ss.A])
b = np.array([[1], [0]])
x0 = np.linalg.solve(A, b)
print(x0)
дает:
[[-1.00000000e+00]
[-1.36642834e-15]]
Следовательно, это должно работать:
T, yout = ctl.forced_response(sys_ss, T=t, X0=[-1, 0])
Кроме того, поскольку вас интересует только переходная реакция на начальное условие (т. Е.
u(t)=0) вы можете использовать initial_response функция:
T, yout = ctl.initial_response(sys_ss, T=t, X0=[-1, 0])
Благодаря комментарию @LutzLehmann, я думаю о значении слова "дважды кодировать" некоторые вещи. Итак, возвращаясь к исходной точке, я понял, что эта передаточная функция включает в себя как входные (время или линейное изменение), так и начальные условия. Фактически это выход. Мне нужно какое-то обратное преобразование Лапласа или, как я начинаю думать, мне нужно только смоделировать его как есть, без дополнительной информации.
Таким образом, мне удалось использовать импульсный вход (преобразование Лапласа равно 1), и я смог получить выходной сигнал, который точно соответствовал моему tf, смоделированному во времени.
import numpy as np
import control as ctl
import matplotlib.pyplot as plt
t = np.linspace(0., 1.5, 100)
sys = ctl.tf([1.,-4.],[1.,-4.,13.])
T, yout = ctl.impulse_response(sys, T=t) # HERE is what I wanted
y_ans = lambda x: 1/3*np.exp(2*x)*(3*np.cos(3*x) - 2*np.sin(3*x))
plt.plot(t, y_ans(t), '-.', color='gray', alpha=0.5, linewidth=3, label='correct answer')
plt.plot(T, yout, 'r', label='simulated')
plt.legend()
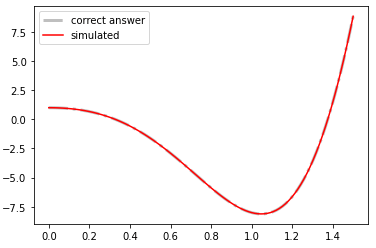
Теперь я думаю, что могу показать, как использовать python-control для косвенного моделирования ответов для дифференциальных уравнений.:-D