Поверните геометрию так, чтобы ее плоскость соответствовала базовой плоскости
У меня есть трехмерная кристаллическая структура, записанная в декартовых координатах. Уточняю фрезеровку кристалла. Затем эта плоскость Миллера должна выровняться с плоскостью xy системы отсчета.
Более ранняя ветка помогла мне добиться этого. Были предприняты следующие шаги:
- Определить мельник-самолет
- Создайте локальную декартову систему отсчета, ориентированную на плоскость Миллера
- Получите единичные векторы этого локального кадра
- Возьмите продукт этих единичных векторов с векторами, которые описывают положение атома по сравнению с исходной точкой отсчета.
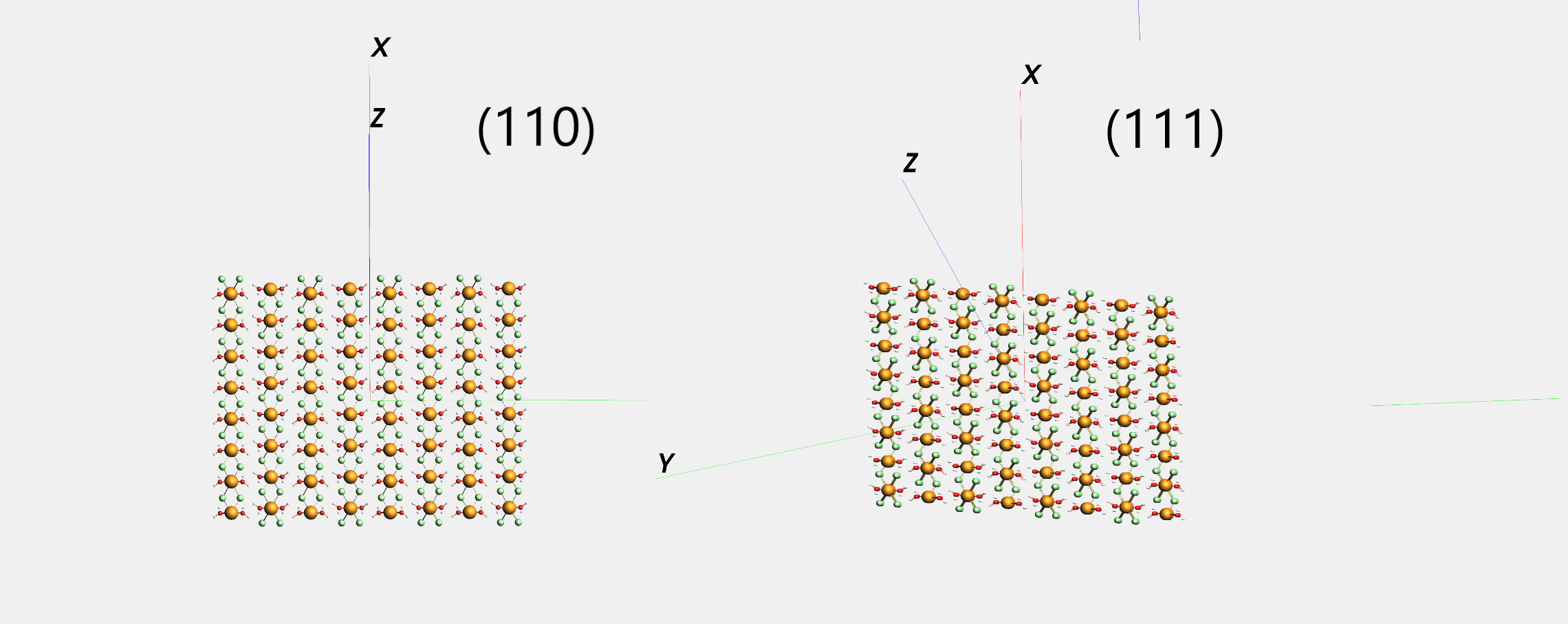
Указание таких плоскостей Миллера, как (1 0 0), (0 -2 1), (10, 0 1), не проблема и отлично работает. Однако задание плоскости Миллера как (1 1 1) приводит к перекосу кристалла.
Я включил здесь изображение для иллюстрации.
Здесь приведен фрагмент кода, использованный для этой операции. Вызывается MillerRotate. Он возвращает единичные векторы, которые будут использоваться для продукта с векторами координат атомов. Этот inproduct взят в классе Rotate.
class MillerRotate(Rotate):
def __init__(self, indices):
self.indices = indices
def rotate_func(self, geom):
data = geom.coordinates
lattice = np.array([ geom.lattice[0][0], geom.lattice[1][1], geom.lattice[2][2] ])
if (self.indices == [0,0,0]):
raise Exception(
"Cannot rotate 0 0 0")
# get 3 points at the miller plane
a = np.zeros((len(lattice), len(lattice)))
for i in range(len(lattice)):
if (self.indices[i] != 0):
a[i][i] = self.indices[i]*lattice[i]
else:
a[i][i] = lattice[i]
j = self.indices.index(next(filter(lambda x: x!=0, self.indices)))
a[i][j] = self.indices[j]*lattice[j]
# compute two vectors to get plane
v1 = a[1]-a[0]
v2 = a[2]-a[0]
# compute unit vectors
z = np.cross(v1,v2)
y = np.cross(v1,z)
x = np.cross(y ,z)
z = z/max(z,key=abs)
y = y/max(y,key=abs)
x = x/max(x,key=abs)
# matrix to be taken as inproduct with atom coordinates.
A = np.array([x, y, z])
if np.linalg.det(A) < 0.0:
A[2,:] *= -1.0
return A
class Rotate(Operation):
'''Generic rotation'''
def __init__(self):
self.rotate_func = None
def __call__(self, geom):
data = geom.coordinates
A = self.rotate_func(geom)
detA = np.linalg.det(A)
if detA < 0.0:
raise Exception("Determinant of Rotation needs to be 1")
tmp = np.dot(data, A.T)
data[:] = tmp[:]