Выходные данные решения solvePnP не соответствуют projectPoints
Я получаю странные данные от solvePnP, поэтому я попытался проверить их с помощью projectPoints:
retval, rvec, tvec=cv2.solvePnP(opts, ipts, mtx, dist, flags=cv2.SOLVEPNP_ITERATIVE)
print(retval,rvec,tvec)
proj, jac = cv2.projectPoints(opts, rvec, tvec, mtx, dist)
print(proj,ipts)
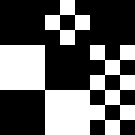
здесь опции - это 3d точки с z=0, обнаруженные на этой картинке:
И ipts взяты из этой картинки (только часть изображения здесь):
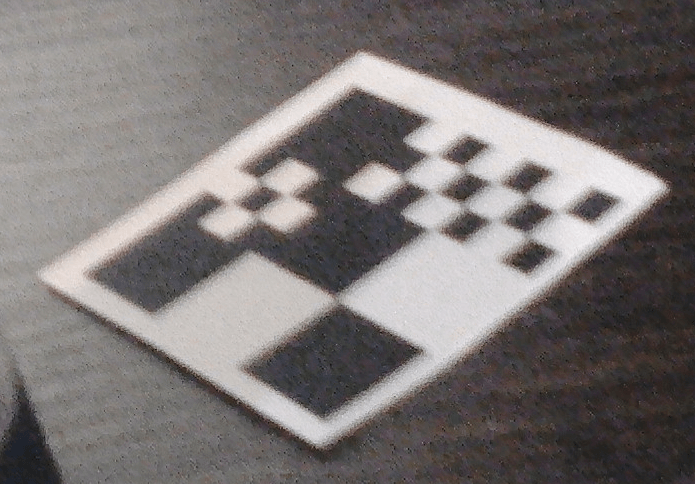
Я сам проверил точки (определяется с помощью SIFT, точки определяются правильно и спариваются правильно).
Теперь я хочу проверить, верны ли rvec и tvec, найденные SolvePnP, поэтому я вызываю cv2.projectPoint, чтобы проверить, проецируются ли трехмерные точки на точки изображения. И вот что у меня есть:
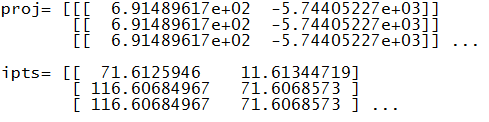
Итак, я вижу, что спроецированные точки лежат за пределами изображения, имея y<0.
(возвращение из solvePnP верно)
Это матрица искажений dist:
1.6324642475694839e+02 -2.1480843988631259e+04 -3.4969507980045117e-01 7.9693609309756430e-01 -4.0684056606034986e+01
Это MTX:
6.4154558230601404e+04 0. 1.2973531562160772e+03
0. 9.8908265814965678e+04 9.5760834379036123e+02
0. 0. 1.
Это вариант:
[[ 1708.74987793 1138.92041016 0. ]
[ 1708.74987793 1138.92041016 0. ]
[ 1708.74987793 1138.92041016 0. ]
[ 1708.74987793 1138.92041016 0. ]
[ 1708.74987793 1138.92041016 0. ]
[ 1708.74987793 1138.92041016 0. ]
[ 1708.74987793 1138.92041016 0. ]
[ 1984.09973145 1069.31677246 0. ]
[ 1984.09973145 1069.31677246 0. ]
[ 1908.19396973 1200.05529785 0. ]
[ 1994.56677246 1286.16516113 0. ]
[ 1994.56677246 1286.16516113 0. ]
[ 1806.82177734 1058.06872559 0. ]
[ 1925.55639648 1077.33703613 0. ]
[ 1998.30627441 1115.51647949 0. ]
[ 1998.30627441 1115.51647949 0. ]
[ 1998.30627441 1115.51647949 0. ]
[ 2013.79003906 1168.08728027 0. ]
[ 1972.93457031 1234.92614746 0. ]
[ 2029.11364746 1220.234375 0. ]]
Это ipts:
[[ 71.6125946 11.61344719]
[ 116.60684967 71.6068573 ]
[ 116.60684967 71.6068573 ]
[ 101.60684967 86.60684967]
[ 101.60684967 86.60684967]
[ 116.60684967 101.6068573 ]
[ 116.60684967 101.6068573 ]
[ 112.37421417 53.40462112]
[ 112.37421417 53.40462112]
[ 83.76233673 84.36077118]
[ 98.45358276 112.38414764]
[ 98.45358276 112.38414764]
[ 67.2594223 38.04878998]
[ 96.85155487 51.85028076]
[ 112.26165009 67.25630188]
[ 112.26165009 67.25630188]
[ 112.26165009 67.25630188]
[ 112.24694061 82.24401855]
[ 96.82528687 97.66513824]
[ 112.2511673 97.25905609]]
rvec = [[-0.21890167] [-0.86241377] [ 0.96051463]]
tvec = [[ 239.04461181] [-2165.99539286] [-1700.61539107]]
Также я попытался следовать одному из комментариев и умножить каждый y из опций на -1, но это дало мне еще более сумасшедшие координаты вне картинки, как 10^13.
1 ответ
Матрица камеры (мтс) неверна. Fx и Fy очень разные (Fx=6,4154558230601404e+04 Fy=9,8908265814965678e + 04) и очень большие. Согласно комментарию в функции OpenCV calibrateCamera () эта проблема обычно возникает, потому что вы, вероятно, использовали patternSize = cvSize (строки, столбцы) вместо использования patternSize = cvSize (столбцы, строки) в findChessboardCorners.