Алгоритм упрощения линии: Висвалингам - Дуглас-Пейкер
Я пытаюсь реализовать алгоритм Siplification. Основные два алгоритма, которые я нашел, это Ramer-Douglas-Peucker: https://en.wikipedia.org/wiki/Ramer%E2%80%93Douglas%E2%80%93Peucker_algorithm и Visvalingam-Whyatt: https://bost.ocks.org/mike/simplify/ В настоящее время я запускаю несколько их симуляций на matlab, чтобы определить, какие из них лучше отвечают моим потребностям.
Основная цель алгоритма - симплифицировать многоугольники на карте. Мой вход - это полигон \ полилиния и порог ошибки-эпсилона.
Мне нужно, чтобы упрощенный полигон был как можно ближе к оригиналу, и у меня нет требования по количеству точек, которые нужно сохранить.
У меня возникают трудности при сравнении двух алгоритмов, потому что: epsilon для RDP - это расстояние, а epsilon для VW - это область. Мне нужна помощь в понимании того, как сравнивать два алгоритма. что может дать мне меньше очков, чтобы удержаться в пределах порога?
1 ответ
Мне нужно, чтобы упрощенный полигон был как можно ближе к оригиналу, и у меня нет требования по количеству точек, которые нужно сохранить.
Метод DP даст вам лучшее восприятие с меньшим количеством точек - как его контрольный параметр, то есть допуск на расстояние определяется вашим требованием "как можно ближе".
Сказав это, масштаб всего многоугольника или облака точек относительно размеров в пикселях будет иметь большее влияние для меньших изображений. Упражнение ниже может дать вам представление о том, как работают два алгоритма.
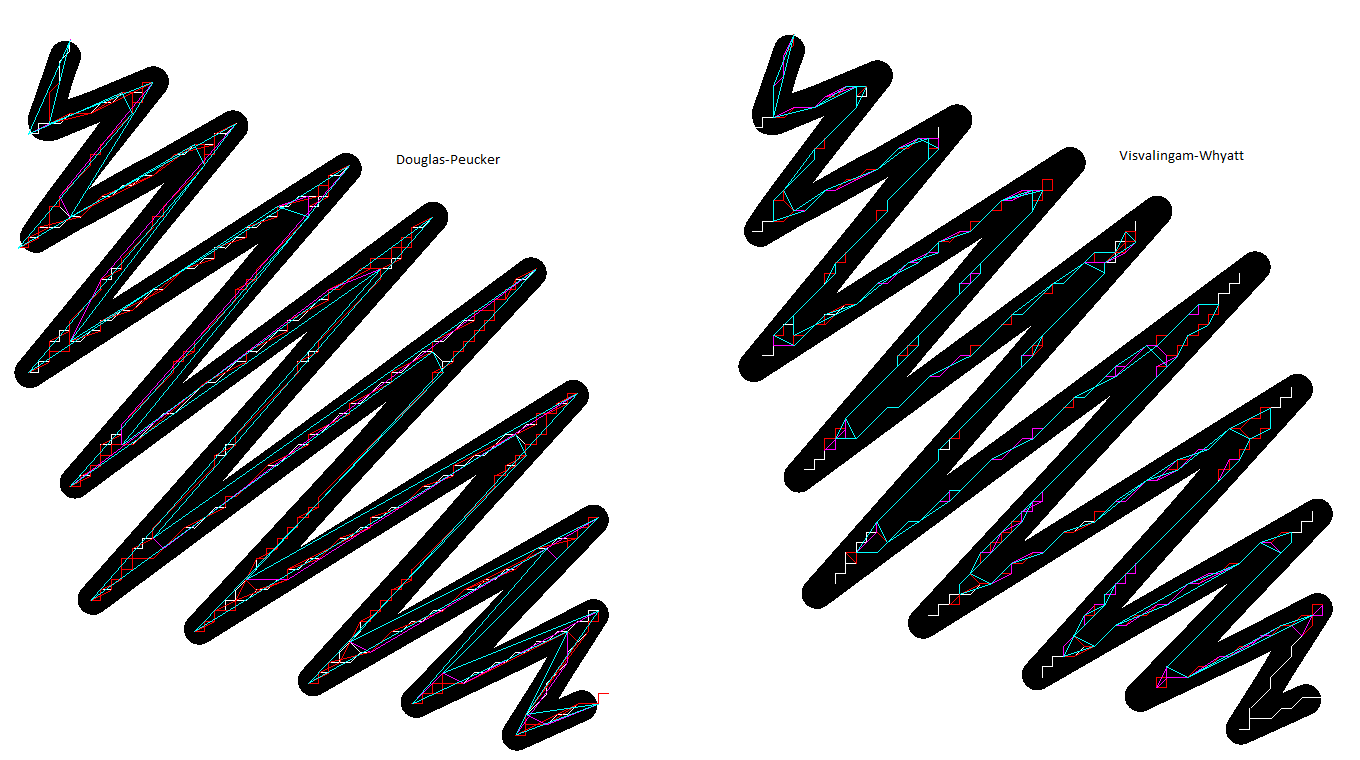
Вот некоторые сравнения, которые я провел между Visvalingam-Whyatt и Ramer-Douglas-Peucker для нескольких контуров, содержащихся в растровом изображении размером около 100x100. Изображения представляют собой скриншоты с 10-кратным увеличением контуров.
(вы можете загрузить изображения, чтобы оценить разницу в производительности)
Результаты метода Visvalingam-Whyatt: любезно предоставлено реализацией Зака на github, портированной на типы данных opencv. , 0,5 (красный), 1 (пурпурный), 2 (голубой")
Упрощение VSV - с допусками 0,55 (белый), 0,4 (красный), 0,25 (пурпурный), 0,15 (голубой)
VSV - точка снижения t:% допуска. это напрямую определяет n = t * orig / 100. n - итоговое количество баллов
orig 88: [n=47 for t=0.55], [n=34 for t=0.4], [n=20 for t=0.25], [n=12 for t=0.15]
orig 133: [n=72 for t=0.55], [n=52 for t=0.4], [n=32 for t=0.25], [n=18 for t=0.15]
orig 118: [n=63 for t=0.55], [n=46 for t=0.4], [n=28 for t=0.25], [n=16 for t=0.15]
orig 107: [n=57 for t=0.55], [n=41 for t=0.4], [n=25 for t=0.25], [n=15 for t=0.15]
orig 107: [n=57 for t=0.55], [n=41 for t=0.4], [n=25 for t=0.25], [n=15 for t=0.15]
orig 268: [n=146 for t=0.55], [n=106 for t=0.4], [n=65 for t=0.25], [n=39 for t=0.15]
orig 158: [n=85 for t=0.55], [n=62 for t=0.4], [n=38 for t=0.25], [n=22 for t=0.15]
orig 158: [n=85 for t=0.55], [n=62 for t=0.4], [n=38 for t=0.25], [n=22 for t=0.15]
orig 109: [n=58 for t=0.55], [n=42 for t=0.4], [n=26 for t=0.25], [n=15 for t=0.15]
orig 192: [n=104 for t=0.55], [n=75 for t=0.4], [n=46 for t=0.25], [n=27 for t=0.15]
orig 132: [n=71 for t=0.55], [n=51 for t=0.4], [n=31 for t=0.25], [n=18 for t=0.15]
orig 89: [n=47 for t=0.55], [n=34 for t=0.4], [n=21 for t=0.25], [n=12 for t=0.15]
orig 110: [n=59 for t=0.55], [n=42 for t=0.4], [n=26 for t=0.25], [n=15 for t=0.15]
orig 40: [n=20 for t=0.55], [n=14 for t=0.4], [n=8 for t=0.25], [n=4 for t=0.15]
Результаты метода DP с использованием openCV окПолиДП
, 0,5 (красный), 1 (пурпурный), 2 (голубой")
Дуглас-Пеккер - уменьшение точек t: допуск на расстояние в пикселях => нет прямой корреляции с n - конечное число точек
orig 88: [n=33 for t=0.1], [n=29 for t=0.5], [n=8 for t=1], [n=6 for t=2]
orig 133: [n=57 for t=0.1], [n=45 for t=0.5], [n=12 for t=1], [n=7 for t=2]
orig 118: [n=50 for t=0.1], [n=40 for t=0.5], [n=15 for t=1], [n=8 for t=2]
orig 107: [n=47 for t=0.1], [n=35 for t=0.5], [n=11 for t=1], [n=6 for t=2]
orig 107: [n=30 for t=0.1], [n=24 for t=0.5], [n=8 for t=1], [n=6 for t=2]
orig 268: [n=126 for t=0.1], [n=110 for t=0.5], [n=32 for t=1], [n=23 for t=2]
orig 158: [n=80 for t=0.1], [n=62 for t=0.5], [n=17 for t=1], [n=11 for t=2]
orig 158: [n=66 for t=0.1], [n=52 for t=0.5], [n=16 for t=1], [n=9 for t=2]
orig 109: [n=50 for t=0.1], [n=38 for t=0.5], [n=12 for t=1], [n=9 for t=2]
orig 192: [n=74 for t=0.1], [n=64 for t=0.5], [n=18 for t=1], [n=15 for t=2]
orig 132: [n=58 for t=0.1], [n=45 for t=0.5], [n=14 for t=1], [n=11 for t=2]
orig 89: [n=37 for t=0.1], [n=31 for t=0.5], [n=7 for t=1], [n=6 for t=2]
orig 110: [n=42 for t=0.1], [n=36 for t=0.5], [n=9 for t=1], [n=7 for t=2]
orig 40: [n=18 for t=0.1], [n=15 for t=0.5], [n=9 for t=1], [n=3 for t=2]
Резюме:
- Оба метода изящно ухудшаются.
- VSV позволяет указать количество аппроксимируемых точек (в этой реализации)
- VSV в этой реализации позволяет выбирать несколько приближенных полигонов за один выстрел.
- VSV сохраняет большое количество выпуклостей на уровне пикселей даже для больших участков кривизны - это может быть нежелательно в некоторых случаях.
- DP лучше следует за выпуклостями и больше сглаживает перегибы, но жертвуя "близостью".
- В результате DP дает меньшее количество баллов за один и тот же достигнутый допуск - что в любом случае трудно сравнить между двумя методами
- DP дает лучшее представление о допуске, так как его линейная спецификация расстояния.
Для моего приложения я предпочитаю контроль, предлагаемый VWV в этой реализации, над возможной эффективностью метода DP.
Но в целом я чувствую, что реализация DP openCVs дает более плавное восприятие.
Хотя мои выводы о производительности VSV основаны только на реализации Зака, я сомневаюсь, что другие реализации дадут характерно разные подмножества полигонов.
[ОБНОВЛЕНИЕ1] Вот сравнение для худшего сценария. DP визуально более приемлемый.