Наименьшее расстояние между точкой и отрезком
Мне нужна основная функция, чтобы найти кратчайшее расстояние между точкой и отрезком. Не стесняйтесь написать решение на любом языке, который вы хотите; Я могу перевести это в то, что я использую (Javascript).
РЕДАКТИРОВАТЬ: мой сегмент линии определяется двумя конечными точками. Так что мой линейный сегмент AB определяется двумя точками A (x1,y1) а также B (x2,y2), Я пытаюсь найти расстояние между этим отрезком и точкой C (x3,y3), Мои навыки геометрии ржавые, поэтому примеры, которые я видел, сбивают с толку, извините, признаюсь.
56 ответов
Эли, код, на котором ты остановился, неверен. Точка около линии, на которой лежит сегмент, но далеко от одного конца сегмента, будет неверно оценена около сегмента. Обновление: упомянутый неверный ответ больше не является принятым.
Вот некоторый правильный код на C++. Это предполагает класс 2D-вектор class vec2 {float x,y;} по существу, с операторами для сложения, вычитания, масштабирования и т. д., а также с функцией расстояния и точечного произведения (т.е. x1 x2 + y1 y2).
float minimum_distance(vec2 v, vec2 w, vec2 p) {
// Return minimum distance between line segment vw and point p
const float l2 = length_squared(v, w); // i.e. |w-v|^2 - avoid a sqrt
if (l2 == 0.0) return distance(p, v); // v == w case
// Consider the line extending the segment, parameterized as v + t (w - v).
// We find projection of point p onto the line.
// It falls where t = [(p-v) . (w-v)] / |w-v|^2
// We clamp t from [0,1] to handle points outside the segment vw.
const float t = max(0, min(1, dot(p - v, w - v) / l2));
const vec2 projection = v + t * (w - v); // Projection falls on the segment
return distance(p, projection);
}
РЕДАКТИРОВАТЬ: Мне нужна реализация Javascript, так что здесь, без каких-либо зависимостей (или комментариев, но это прямой порт вышеупомянутого). Точки представлены в виде объектов с x а также y атрибутов.
function sqr(x) { return x * x }
function dist2(v, w) { return sqr(v.x - w.x) + sqr(v.y - w.y) }
function distToSegmentSquared(p, v, w) {
var l2 = dist2(v, w);
if (l2 == 0) return dist2(p, v);
var t = ((p.x - v.x) * (w.x - v.x) + (p.y - v.y) * (w.y - v.y)) / l2;
t = Math.max(0, Math.min(1, t));
return dist2(p, { x: v.x + t * (w.x - v.x),
y: v.y + t * (w.y - v.y) });
}
function distToSegment(p, v, w) { return Math.sqrt(distToSegmentSquared(p, v, w)); }
РЕДАКТИРОВАТЬ 2: Мне нужна версия Java, но что более важно, мне нужно было в 3D вместо 2d.
float dist_to_segment_squared(float px, float py, float pz, float lx1, float ly1, float lz1, float lx2, float ly2, float lz2) {
float line_dist = dist_sq(lx1, ly1, lz1, lx2, ly2, lz2);
if (line_dist == 0) return dist_sq(px, py, pz, lx1, ly1, lz1);
float t = ((px - lx1) * (lx2 - lx1) + (py - ly1) * (ly2 - ly1) + (pz - lz1) * (lz2 - lz1)) / line_dist;
t = constrain(t, 0, 1);
return dist_sq(px, py, pz, lx1 + t * (lx2 - lx1), ly1 + t * (ly2 - ly1), lz1 + t * (lz2 - lz1));
}
Вот самый простой полный код в Javascript.
x, y - ваша целевая точка, а x1, y1 - x2, y2 - ваш отрезок.
ОБНОВЛЕНО: исправлена проблема с длиной линии в комментариях.
function pDistance(x, y, x1, y1, x2, y2) {
var A = x - x1;
var B = y - y1;
var C = x2 - x1;
var D = y2 - y1;
var dot = A * C + B * D;
var len_sq = C * C + D * D;
var param = -1;
if (len_sq != 0) //in case of 0 length line
param = dot / len_sq;
var xx, yy;
if (param < 0) {
xx = x1;
yy = y1;
}
else if (param > 1) {
xx = x2;
yy = y2;
}
else {
xx = x1 + param * C;
yy = y1 + param * D;
}
var dx = x - xx;
var dy = y - yy;
return Math.sqrt(dx * dx + dy * dy);
}
Это реализация, сделанная для сегментов FINITE LINE, а не бесконечные линии, как большинство других функций здесь (вот почему я сделал это).
Пример здесь.
Python:
import math
def dist(x1,y1, x2,y2, x3,y3): # x3,y3 is the point
px = x2-x1
py = y2-y1
something = px*px + py*py
u = ((x3 - x1) * px + (y3 - y1) * py) / float(something)
if u > 1:
u = 1
elif u < 0:
u = 0
x = x1 + u * px
y = y1 + u * py
dx = x - x3
dy = y - y3
# Note: If the actual distance does not matter,
# if you only want to compare what this function
# returns to other results of this function, you
# can just return the squared distance instead
# (i.e. remove the sqrt) to gain a little performance
dist = math.sqrt(dx*dx + dy*dy)
return dist
AS3:
public static function segmentDistToPoint(segA:Point, segB:Point, p:Point):Number
{
var p2:Point = new Point(segB.x - segA.x, segB.y - segA.y);
var something:Number = p2.x*p2.x + p2.y*p2.y;
var u:Number = ((p.x - segA.x) * p2.x + (p.y - segA.y) * p2.y) / something;
if (u > 1)
u = 1;
else if (u < 0)
u = 0;
var x:Number = segA.x + u * p2.x;
var y:Number = segA.y + u * p2.y;
var dx:Number = x - p.x;
var dy:Number = y - p.y;
var dist:Number = Math.sqrt(dx*dx + dy*dy);
return dist;
}
Джава
private double shortestDistance(float x1,float y1,float x2,float y2,float x3,float y3)
{
float px=x2-x1;
float py=y2-y1;
float temp=(px*px)+(py*py);
float u=((x3 - x1) * px + (y3 - y1) * py) / (temp);
if(u>1){
u=1;
}
else if(u<0){
u=0;
}
float x = x1 + u * px;
float y = y1 + u * py;
float dx = x - x3;
float dy = y - y3;
double dist = Math.sqrt(dx*dx + dy*dy);
return dist;
}
Они были сделаны из этого.
В моей собственной теме вопроса, как рассчитать кратчайшее 2D расстояние между точкой и отрезком линии во всех случаях в C, C# / .NET 2.0 или Java? Меня попросили поместить ответ C# здесь, когда я его найду: вот он, измененный с http://www.topcoder.com/tc?d1=tutorials&d2=geometry1&module=Static:
//Compute the dot product AB . BC
private double DotProduct(double[] pointA, double[] pointB, double[] pointC)
{
double[] AB = new double[2];
double[] BC = new double[2];
AB[0] = pointB[0] - pointA[0];
AB[1] = pointB[1] - pointA[1];
BC[0] = pointC[0] - pointB[0];
BC[1] = pointC[1] - pointB[1];
double dot = AB[0] * BC[0] + AB[1] * BC[1];
return dot;
}
//Compute the cross product AB x AC
private double CrossProduct(double[] pointA, double[] pointB, double[] pointC)
{
double[] AB = new double[2];
double[] AC = new double[2];
AB[0] = pointB[0] - pointA[0];
AB[1] = pointB[1] - pointA[1];
AC[0] = pointC[0] - pointA[0];
AC[1] = pointC[1] - pointA[1];
double cross = AB[0] * AC[1] - AB[1] * AC[0];
return cross;
}
//Compute the distance from A to B
double Distance(double[] pointA, double[] pointB)
{
double d1 = pointA[0] - pointB[0];
double d2 = pointA[1] - pointB[1];
return Math.Sqrt(d1 * d1 + d2 * d2);
}
//Compute the distance from AB to C
//if isSegment is true, AB is a segment, not a line.
double LineToPointDistance2D(double[] pointA, double[] pointB, double[] pointC,
bool isSegment)
{
double dist = CrossProduct(pointA, pointB, pointC) / Distance(pointA, pointB);
if (isSegment)
{
double dot1 = DotProduct(pointA, pointB, pointC);
if (dot1 > 0)
return Distance(pointB, pointC);
double dot2 = DotProduct(pointB, pointA, pointC);
if (dot2 > 0)
return Distance(pointA, pointC);
}
return Math.Abs(dist);
}
Я @SO, чтобы не отвечать, а задавать вопросы, поэтому я надеюсь, что я не получу миллион голосов по некоторым причинам, но создаю критику. Я просто хотел (и был воодушевлен) поделиться чужими идеями, поскольку решения в этой теме либо на каком-то экзотическом языке (Fortran, Mathematica), либо кем-то помечены как ошибочные. Единственный полезный (от Grumdrig) для меня написан на C++, и никто не отметил, что он неисправен. Но в нем отсутствуют методы (точки и т. Д.), Которые вызываются.
Для тех, кто заинтересован, вот тривиальное преобразование кода Javascript Джошуа в Objective-C:
- (double)distanceToPoint:(CGPoint)p fromLineSegmentBetween:(CGPoint)l1 and:(CGPoint)l2
{
double A = p.x - l1.x;
double B = p.y - l1.y;
double C = l2.x - l1.x;
double D = l2.y - l1.y;
double dot = A * C + B * D;
double len_sq = C * C + D * D;
double param = dot / len_sq;
double xx, yy;
if (param < 0 || (l1.x == l2.x && l1.y == l2.y)) {
xx = l1.x;
yy = l1.y;
}
else if (param > 1) {
xx = l2.x;
yy = l2.y;
}
else {
xx = l1.x + param * C;
yy = l1.y + param * D;
}
double dx = p.x - xx;
double dy = p.y - yy;
return sqrtf(dx * dx + dy * dy);
}
Мне нужно было это решение для работы с MKMapPoint так что я поделюсь этим на случай, если кому-то еще это понадобится. Просто небольшое изменение, и это вернет расстояние в метрах:
- (double)distanceToPoint:(MKMapPoint)p fromLineSegmentBetween:(MKMapPoint)l1 and:(MKMapPoint)l2
{
double A = p.x - l1.x;
double B = p.y - l1.y;
double C = l2.x - l1.x;
double D = l2.y - l1.y;
double dot = A * C + B * D;
double len_sq = C * C + D * D;
double param = dot / len_sq;
double xx, yy;
if (param < 0 || (l1.x == l2.x && l1.y == l2.y)) {
xx = l1.x;
yy = l1.y;
}
else if (param > 1) {
xx = l2.x;
yy = l2.y;
}
else {
xx = l1.x + param * C;
yy = l1.y + param * D;
}
return MKMetersBetweenMapPoints(p, MKMapPointMake(xx, yy));
}
В Mathematica
Он использует параметрическое описание сегмента и проецирует точку в линию, определенную сегментом. Поскольку параметр изменяется от 0 до 1 в сегменте, если проекция выходит за эти границы, мы вычисляем расстояние до соответствующей точки вместо прямой, перпендикулярной сегменту.
Clear["Global`*"];
distance[{start_, end_}, pt_] :=
Module[{param},
param = ((pt - start).(end - start))/Norm[end - start]^2; (*parameter. the "."
here means vector product*)
Which[
param < 0, EuclideanDistance[start, pt], (*If outside bounds*)
param > 1, EuclideanDistance[end, pt],
True, EuclideanDistance[pt, start + param (end - start)] (*Normal distance*)
]
];
Результат печати:
Plot3D[distance[{{0, 0}, {1, 0}}, {xp, yp}], {xp, -1, 2}, {yp, -1, 2}]

Нанесите эти точки ближе, чем расстояние отсечки:

Контур Участка:

В F# расстояние от точки c к отрезку между a а также b дан кем-то:
let pointToLineSegmentDistance (a: Vector, b: Vector) (c: Vector) =
let d = b - a
let s = d.Length
let lambda = (c - a) * d / s
let p = (lambda |> max 0.0 |> min s) * d / s
(a + p - c).Length
Вектор d очки от a в b вдоль отрезка. Точечное произведение d/s с c-a дает параметр точки ближайшего сближения между бесконечной линией и точкой c, min а также max функция используется для фиксации этого параметра в диапазоне 0..s так что точка лежит между a а также b, Наконец, длина a+p-c это расстояние от c до ближайшей точки на отрезке.
Пример использования:
pointToLineSegmentDistance (Vector(0.0, 0.0), Vector(1.0, 0.0)) (Vector(-1.0, 1.0))
Эй, я только что написал это вчера. Это в ActionScript 3.0, который в основном является Javascript, хотя у вас может не быть того же класса Point.
//st = start of line segment
//b = the line segment (as in: st + b = end of line segment)
//pt = point to test
//Returns distance from point to line segment.
//Note: nearest point on the segment to the test point is right there if we ever need it
public static function linePointDist( st:Point, b:Point, pt:Point ):Number
{
var nearestPt:Point; //closest point on seqment to pt
var keyDot:Number = dot( b, pt.subtract( st ) ); //key dot product
var bLenSq:Number = dot( b, b ); //Segment length squared
if( keyDot <= 0 ) //pt is "behind" st, use st
{
nearestPt = st
}
else if( keyDot >= bLenSq ) //pt is "past" end of segment, use end (notice we are saving twin sqrts here cuz)
{
nearestPt = st.add(b);
}
else //pt is inside segment, reuse keyDot and bLenSq to get percent of seqment to move in to find closest point
{
var keyDotToPctOfB:Number = keyDot/bLenSq; //REM dot product comes squared
var partOfB:Point = new Point( b.x * keyDotToPctOfB, b.y * keyDotToPctOfB );
nearestPt = st.add(partOfB);
}
var dist:Number = (pt.subtract(nearestPt)).length;
return dist;
}
Кроме того, здесь есть довольно полное и читаемое обсуждение проблемы: notejot.com
Однолинейное решение с использованием арктангенсов:
Идея состоит в том, чтобы переместить A в (0, 0) и повернуть треугольник по часовой стрелке, чтобы заставить C лежать на оси X, когда это произойдет, By будет расстоянием.
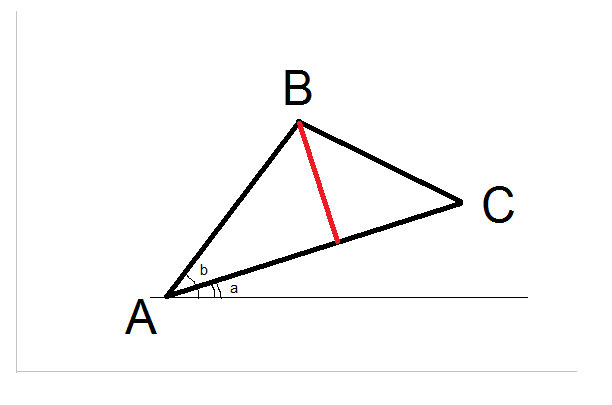
- угол = Атан (Cy - Ay, Cx - Ax);
- угол b = Atan (By - Ay, Bx - Axe);
- Длина AB = Sqrt( (Bx - Axe) ^ 2 + (By - Ay) ^ 2)
- By = Sin (bAngle - aAngle) * ABLength
C#
public double Distance(Point a, Point b, Point c)
{
// normalize points
Point cn = new Point(c.X - a.X, c.Y - a.Y);
Point bn = new Point(b.X - a.X, b.Y - a.Y);
double angle = Math.Atan2(bn.Y, bn.X) - Math.Atan2(cn.Y, cn.X);
double abLength = Math.Sqrt(bn.X*bn.X + bn.Y*bn.Y);
return Math.Sin(angle)*abLength;
}
Одна строка C# (для преобразования в SQL)
double distance = Math.Sin(Math.Atan2(b.Y - a.Y, b.X - a.X) - Math.Atan2(c.Y - a.Y, c.X - a.X)) * Math.Sqrt((b.X - a.X) * (b.X - a.X) + (b.Y - a.Y) * (b.Y - a.Y))
Для ленивых, вот мой порт Objective-C решения @Grumdrig выше:
CGFloat sqr(CGFloat x) { return x*x; }
CGFloat dist2(CGPoint v, CGPoint w) { return sqr(v.x - w.x) + sqr(v.y - w.y); }
CGFloat distanceToSegmentSquared(CGPoint p, CGPoint v, CGPoint w)
{
CGFloat l2 = dist2(v, w);
if (l2 == 0.0f) return dist2(p, v);
CGFloat t = ((p.x - v.x) * (w.x - v.x) + (p.y - v.y) * (w.y - v.y)) / l2;
if (t < 0.0f) return dist2(p, v);
if (t > 1.0f) return dist2(p, w);
return dist2(p, CGPointMake(v.x + t * (w.x - v.x), v.y + t * (w.y - v.y)));
}
CGFloat distanceToSegment(CGPoint point, CGPoint segmentPointV, CGPoint segmentPointW)
{
return sqrtf(distanceToSegmentSquared(point, segmentPointV, segmentPointW));
}
Не смог устоять перед кодированием в python:)
from math import sqrt, fabs
def pdis(a, b, c):
t = b[0]-a[0], b[1]-a[1] # Vector ab
dd = sqrt(t[0]**2+t[1]**2) # Length of ab
t = t[0]/dd, t[1]/dd # unit vector of ab
n = -t[1], t[0] # normal unit vector to ab
ac = c[0]-a[0], c[1]-a[1] # vector ac
return fabs(ac[0]*n[0]+ac[1]*n[1]) # Projection of ac to n (the minimum distance)
print pdis((1,1), (2,2), (2,0)) # Example (answer is 1.414)
То же самое для Фортрана:)
real function pdis(a, b, c)
real, dimension(0:1), intent(in) :: a, b, c
real, dimension(0:1) :: t, n, ac
real :: dd
t = b - a ! Vector ab
dd = sqrt(t(0)**2+t(1)**2) ! Length of ab
t = t/dd ! unit vector of ab
n = (/-t(1), t(0)/) ! normal unit vector to ab
ac = c - a ! vector ac
pdis = abs(ac(0)*n(0)+ac(1)*n(1)) ! Projection of ac to n (the minimum distance)
end function pdis
program test
print *, pdis((/1.0,1.0/), (/2.0,2.0/), (/2.0,0.0/)) ! Example (answer is 1.414)
end program test
Вот более полное изложение решения Грумдрига. Эта версия также возвращает самую близкую точку.
#include "stdio.h"
#include "math.h"
class Vec2
{
public:
float _x;
float _y;
Vec2()
{
_x = 0;
_y = 0;
}
Vec2( const float x, const float y )
{
_x = x;
_y = y;
}
Vec2 operator+( const Vec2 &v ) const
{
return Vec2( this->_x + v._x, this->_y + v._y );
}
Vec2 operator-( const Vec2 &v ) const
{
return Vec2( this->_x - v._x, this->_y - v._y );
}
Vec2 operator*( const float f ) const
{
return Vec2( this->_x * f, this->_y * f );
}
float DistanceToSquared( const Vec2 p ) const
{
const float dX = p._x - this->_x;
const float dY = p._y - this->_y;
return dX * dX + dY * dY;
}
float DistanceTo( const Vec2 p ) const
{
return sqrt( this->DistanceToSquared( p ) );
}
float DotProduct( const Vec2 p ) const
{
return this->_x * p._x + this->_y * p._y;
}
};
// return minimum distance between line segment vw and point p, and the closest point on the line segment, q
float DistanceFromLineSegmentToPoint( const Vec2 v, const Vec2 w, const Vec2 p, Vec2 * const q )
{
const float distSq = v.DistanceToSquared( w ); // i.e. |w-v|^2 ... avoid a sqrt
if ( distSq == 0.0 )
{
// v == w case
(*q) = v;
return v.DistanceTo( p );
}
// consider the line extending the segment, parameterized as v + t (w - v)
// we find projection of point p onto the line
// it falls where t = [(p-v) . (w-v)] / |w-v|^2
const float t = ( p - v ).DotProduct( w - v ) / distSq;
if ( t < 0.0 )
{
// beyond the v end of the segment
(*q) = v;
return v.DistanceTo( p );
}
else if ( t > 1.0 )
{
// beyond the w end of the segment
(*q) = w;
return w.DistanceTo( p );
}
// projection falls on the segment
const Vec2 projection = v + ( ( w - v ) * t );
(*q) = projection;
return p.DistanceTo( projection );
}
float DistanceFromLineSegmentToPoint( float segmentX1, float segmentY1, float segmentX2, float segmentY2, float pX, float pY, float *qX, float *qY )
{
Vec2 q;
float distance = DistanceFromLineSegmentToPoint( Vec2( segmentX1, segmentY1 ), Vec2( segmentX2, segmentY2 ), Vec2( pX, pY ), &q );
(*qX) = q._x;
(*qY) = q._y;
return distance;
}
void TestDistanceFromLineSegmentToPoint( float segmentX1, float segmentY1, float segmentX2, float segmentY2, float pX, float pY )
{
float qX;
float qY;
float d = DistanceFromLineSegmentToPoint( segmentX1, segmentY1, segmentX2, segmentY2, pX, pY, &qX, &qY );
printf( "line segment = ( ( %f, %f ), ( %f, %f ) ), p = ( %f, %f ), distance = %f, q = ( %f, %f )\n",
segmentX1, segmentY1, segmentX2, segmentY2, pX, pY, d, qX, qY );
}
void TestDistanceFromLineSegmentToPoint()
{
TestDistanceFromLineSegmentToPoint( 0, 0, 1, 1, 1, 0 );
TestDistanceFromLineSegmentToPoint( 0, 0, 20, 10, 5, 4 );
TestDistanceFromLineSegmentToPoint( 0, 0, 20, 10, 30, 15 );
TestDistanceFromLineSegmentToPoint( 0, 0, 20, 10, -30, 15 );
TestDistanceFromLineSegmentToPoint( 0, 0, 10, 0, 5, 1 );
TestDistanceFromLineSegmentToPoint( 0, 0, 0, 10, 1, 5 );
}
Рассмотрим эту модификацию ответа Грамдрига выше. Много раз вы обнаружите, что неточность с плавающей запятой может вызвать проблемы. Я использую парные числа в версии ниже, но вы можете легко перейти на поплавки. Важной частью является то, что он использует эпсилон для обработки "помои". Кроме того, вы много раз захотите узнать, ГДЕ произошло пересечение или произошло ли оно вообще. Если возвращенное значение t < 0,0 или> 1,0, столкновения не произошло. Тем не менее, даже если столкновения не произошло, много раз вы захотите узнать, где находится ближайшая точка на сегменте к P, и поэтому я использую qx и qy, чтобы вернуть это местоположение.
double PointSegmentDistanceSquared( double px, double py,
double p1x, double p1y,
double p2x, double p2y,
double& t,
double& qx, double& qy)
{
static const double kMinSegmentLenSquared = 0.00000001; // adjust to suit. If you use float, you'll probably want something like 0.000001f
static const double kEpsilon = 1.0E-14; // adjust to suit. If you use floats, you'll probably want something like 1E-7f
double dx = p2x - p1x;
double dy = p2y - p1y;
double dp1x = px - p1x;
double dp1y = py - p1y;
const double segLenSquared = (dx * dx) + (dy * dy);
if (segLenSquared >= -kMinSegmentLenSquared && segLenSquared <= kMinSegmentLenSquared)
{
// segment is a point.
qx = p1x;
qy = p1y;
t = 0.0;
return ((dp1x * dp1x) + (dp1y * dp1y));
}
else
{
// Project a line from p to the segment [p1,p2]. By considering the line
// extending the segment, parameterized as p1 + (t * (p2 - p1)),
// we find projection of point p onto the line.
// It falls where t = [(p - p1) . (p2 - p1)] / |p2 - p1|^2
t = ((dp1x * dx) + (dp1y * dy)) / segLenSquared;
if (t < kEpsilon)
{
// intersects at or to the "left" of first segment vertex (p1x, p1y). If t is approximately 0.0, then
// intersection is at p1. If t is less than that, then there is no intersection (i.e. p is not within
// the 'bounds' of the segment)
if (t > -kEpsilon)
{
// intersects at 1st segment vertex
t = 0.0;
}
// set our 'intersection' point to p1.
qx = p1x;
qy = p1y;
// Note: If you wanted the ACTUAL intersection point of where the projected lines would intersect if
// we were doing PointLineDistanceSquared, then qx would be (p1x + (t * dx)) and qy would be (p1y + (t * dy)).
}
else if (t > (1.0 - kEpsilon))
{
// intersects at or to the "right" of second segment vertex (p2x, p2y). If t is approximately 1.0, then
// intersection is at p2. If t is greater than that, then there is no intersection (i.e. p is not within
// the 'bounds' of the segment)
if (t < (1.0 + kEpsilon))
{
// intersects at 2nd segment vertex
t = 1.0;
}
// set our 'intersection' point to p2.
qx = p2x;
qy = p2y;
// Note: If you wanted the ACTUAL intersection point of where the projected lines would intersect if
// we were doing PointLineDistanceSquared, then qx would be (p1x + (t * dx)) and qy would be (p1y + (t * dy)).
}
else
{
// The projection of the point to the point on the segment that is perpendicular succeeded and the point
// is 'within' the bounds of the segment. Set the intersection point as that projected point.
qx = p1x + (t * dx);
qy = p1y + (t * dy);
}
// return the squared distance from p to the intersection point. Note that we return the squared distance
// as an optimization because many times you just need to compare relative distances and the squared values
// works fine for that. If you want the ACTUAL distance, just take the square root of this value.
double dpqx = px - qx;
double dpqy = py - qy;
return ((dpqx * dpqx) + (dpqy * dpqy));
}
}
Я предполагаю, что вы хотите найти кратчайшее расстояние между точкой и отрезком; Для этого вам нужно найти линию (lineA), которая перпендикулярна вашему отрезку (lineB), который проходит через вашу точку, определить пересечение между этой линией (lineA) и вашей линией, проходящей через ваш отрезок line (lineB).; если эта точка находится между двумя точками вашего отрезка, то расстояние - это расстояние между вашей точкой и точкой, которую вы только что нашли, которая является пересечением линии A и линии B; если точка не находится между двумя точками вашего отрезка, вам нужно получить расстояние между вашей точкой и ближе к двум концам отрезка; это можно легко сделать, взяв квадратное расстояние (чтобы избежать квадратного корня) между точкой и двумя точками отрезка; какой бы ни был ближе, возьмите квадратный корень этого.
Вот он использует Swift
/* Distance from a point (p1) to line l1 l2 */
func distanceFromPoint(p: CGPoint, toLineSegment l1: CGPoint, and l2: CGPoint) -> CGFloat {
let A = p.x - l1.x
let B = p.y - l1.y
let C = l2.x - l1.x
let D = l2.y - l1.y
let dot = A * C + B * D
let len_sq = C * C + D * D
let param = dot / len_sq
var xx, yy: CGFloat
if param < 0 || (l1.x == l2.x && l1.y == l2.y) {
xx = l1.x
yy = l1.y
} else if param > 1 {
xx = l2.x
yy = l2.y
} else {
xx = l1.x + param * C
yy = l1.y + param * D
}
let dx = p.x - xx
let dy = p.y - yy
return sqrt(dx * dx + dy * dy)
}
Реализация Grumdrig на C++/JavaScript была для меня очень полезной, поэтому я предоставил прямой порт Python, который я использую. Полный код здесь.
class Point(object):
def __init__(self, x, y):
self.x = float(x)
self.y = float(y)
def square(x):
return x * x
def distance_squared(v, w):
return square(v.x - w.x) + square(v.y - w.y)
def distance_point_segment_squared(p, v, w):
# Segment length squared, |w-v|^2
d2 = distance_squared(v, w)
if d2 == 0:
# v == w, return distance to v
return distance_squared(p, v)
# Consider the line extending the segment, parameterized as v + t (w - v).
# We find projection of point p onto the line.
# It falls where t = [(p-v) . (w-v)] / |w-v|^2
t = ((p.x - v.x) * (w.x - v.x) + (p.y - v.y) * (w.y - v.y)) / d2;
if t < 0:
# Beyond v end of the segment
return distance_squared(p, v)
elif t > 1.0:
# Beyond w end of the segment
return distance_squared(p, w)
else:
# Projection falls on the segment.
proj = Point(v.x + t * (w.x - v.x), v.y + t * (w.y - v.y))
# print proj.x, proj.y
return distance_squared(p, proj)
C#
Адаптировано из @Grumdrig
public static double MinimumDistanceToLineSegment(this Point p,
Line line)
{
var v = line.StartPoint;
var w = line.EndPoint;
double lengthSquared = DistanceSquared(v, w);
if (lengthSquared == 0.0)
return Distance(p, v);
double t = Math.Max(0, Math.Min(1, DotProduct(p - v, w - v) / lengthSquared));
var projection = v + t * (w - v);
return Distance(p, projection);
}
public static double Distance(Point a, Point b)
{
return Math.Sqrt(DistanceSquared(a, b));
}
public static double DistanceSquared(Point a, Point b)
{
var d = a - b;
return DotProduct(d, d);
}
public static double DotProduct(Point a, Point b)
{
return (a.X * b.X) + (a.Y * b.Y);
}
А теперь и мое решение...... (Javascript)
Это очень быстро, потому что я стараюсь избегать любых функций Math.pow.
Как видите, в конце функции у меня есть расстояние до линии.
код взят из библиотеки http://www.draw2d.org/graphiti/jsdoc/
/**
* Static util function to determine is a point(px,py) on the line(x1,y1,x2,y2)
* A simple hit test.
*
* @return {boolean}
* @static
* @private
* @param {Number} coronaWidth the accepted corona for the hit test
* @param {Number} X1 x coordinate of the start point of the line
* @param {Number} Y1 y coordinate of the start point of the line
* @param {Number} X2 x coordinate of the end point of the line
* @param {Number} Y2 y coordinate of the end point of the line
* @param {Number} px x coordinate of the point to test
* @param {Number} py y coordinate of the point to test
**/
graphiti.shape.basic.Line.hit= function( coronaWidth, X1, Y1, X2, Y2, px, py)
{
// Adjust vectors relative to X1,Y1
// X2,Y2 becomes relative vector from X1,Y1 to end of segment
X2 -= X1;
Y2 -= Y1;
// px,py becomes relative vector from X1,Y1 to test point
px -= X1;
py -= Y1;
var dotprod = px * X2 + py * Y2;
var projlenSq;
if (dotprod <= 0.0) {
// px,py is on the side of X1,Y1 away from X2,Y2
// distance to segment is length of px,py vector
// "length of its (clipped) projection" is now 0.0
projlenSq = 0.0;
} else {
// switch to backwards vectors relative to X2,Y2
// X2,Y2 are already the negative of X1,Y1=>X2,Y2
// to get px,py to be the negative of px,py=>X2,Y2
// the dot product of two negated vectors is the same
// as the dot product of the two normal vectors
px = X2 - px;
py = Y2 - py;
dotprod = px * X2 + py * Y2;
if (dotprod <= 0.0) {
// px,py is on the side of X2,Y2 away from X1,Y1
// distance to segment is length of (backwards) px,py vector
// "length of its (clipped) projection" is now 0.0
projlenSq = 0.0;
} else {
// px,py is between X1,Y1 and X2,Y2
// dotprod is the length of the px,py vector
// projected on the X2,Y2=>X1,Y1 vector times the
// length of the X2,Y2=>X1,Y1 vector
projlenSq = dotprod * dotprod / (X2 * X2 + Y2 * Y2);
}
}
// Distance to line is now the length of the relative point
// vector minus the length of its projection onto the line
// (which is zero if the projection falls outside the range
// of the line segment).
var lenSq = px * px + py * py - projlenSq;
if (lenSq < 0) {
lenSq = 0;
}
return Math.sqrt(lenSq)<coronaWidth;
};
Код Matlab со встроенным "самотестированием", если они вызывают функцию без аргументов:
function r = distPointToLineSegment( xy0, xy1, xyP )
% r = distPointToLineSegment( xy0, xy1, xyP )
if( nargin < 3 )
selfTest();
r=0;
else
vx = xy0(1)-xyP(1);
vy = xy0(2)-xyP(2);
ux = xy1(1)-xy0(1);
uy = xy1(2)-xy0(2);
lenSqr= (ux*ux+uy*uy);
detP= -vx*ux + -vy*uy;
if( detP < 0 )
r = norm(xy0-xyP,2);
elseif( detP > lenSqr )
r = norm(xy1-xyP,2);
else
r = abs(ux*vy-uy*vx)/sqrt(lenSqr);
end
end
function selfTest()
%#ok<*NASGU>
disp(['invalid args, distPointToLineSegment running (recursive) self-test...']);
ptA = [1;1]; ptB = [-1;-1];
ptC = [1/2;1/2]; % on the line
ptD = [-2;-1.5]; % too far from line segment
ptE = [1/2;0]; % should be same as perpendicular distance to line
ptF = [1.5;1.5]; % along the A-B but outside of the segment
distCtoAB = distPointToLineSegment(ptA,ptB,ptC)
distDtoAB = distPointToLineSegment(ptA,ptB,ptD)
distEtoAB = distPointToLineSegment(ptA,ptB,ptE)
distFtoAB = distPointToLineSegment(ptA,ptB,ptF)
figure(1); clf;
circle = @(x, y, r, c) rectangle('Position', [x-r, y-r, 2*r, 2*r], ...
'Curvature', [1 1], 'EdgeColor', c);
plot([ptA(1) ptB(1)],[ptA(2) ptB(2)],'r-x'); hold on;
plot(ptC(1),ptC(2),'b+'); circle(ptC(1),ptC(2), 0.5e-1, 'b');
plot(ptD(1),ptD(2),'g+'); circle(ptD(1),ptD(2), distDtoAB, 'g');
plot(ptE(1),ptE(2),'k+'); circle(ptE(1),ptE(2), distEtoAB, 'k');
plot(ptF(1),ptF(2),'m+'); circle(ptF(1),ptF(2), distFtoAB, 'm');
hold off;
axis([-3 3 -3 3]); axis equal;
end
end
Похоже, что почти все остальные в Stackru предоставили ответ (пока 23 ответа), так что вот мой вклад для C#. В основном это основано на ответе М. Каца, который, в свою очередь, основан на ответе Грумдрига.
public struct MyVector
{
private readonly double _x, _y;
// Constructor
public MyVector(double x, double y)
{
_x = x;
_y = y;
}
// Distance from this point to another point, squared
private double DistanceSquared(MyVector otherPoint)
{
double dx = otherPoint._x - this._x;
double dy = otherPoint._y - this._y;
return dx * dx + dy * dy;
}
// Find the distance from this point to a line segment (which is not the same as from this
// point to anywhere on an infinite line). Also returns the closest point.
public double DistanceToLineSegment(MyVector lineSegmentPoint1, MyVector lineSegmentPoint2,
out MyVector closestPoint)
{
return Math.Sqrt(DistanceToLineSegmentSquared(lineSegmentPoint1, lineSegmentPoint2,
out closestPoint));
}
// Same as above, but avoid using Sqrt(), saves a new nanoseconds in cases where you only want
// to compare several distances to find the smallest or largest, but don't need the distance
public double DistanceToLineSegmentSquared(MyVector lineSegmentPoint1,
MyVector lineSegmentPoint2, out MyVector closestPoint)
{
// Compute length of line segment (squared) and handle special case of coincident points
double segmentLengthSquared = lineSegmentPoint1.DistanceSquared(lineSegmentPoint2);
if (segmentLengthSquared < 1E-7f) // Arbitrary "close enough for government work" value
{
closestPoint = lineSegmentPoint1;
return this.DistanceSquared(closestPoint);
}
// Use the magic formula to compute the "projection" of this point on the infinite line
MyVector lineSegment = lineSegmentPoint2 - lineSegmentPoint1;
double t = (this - lineSegmentPoint1).DotProduct(lineSegment) / segmentLengthSquared;
// Handle the two cases where the projection is not on the line segment, and the case where
// the projection is on the segment
if (t <= 0)
closestPoint = lineSegmentPoint1;
else if (t >= 1)
closestPoint = lineSegmentPoint2;
else
closestPoint = lineSegmentPoint1 + (lineSegment * t);
return this.DistanceSquared(closestPoint);
}
public double DotProduct(MyVector otherVector)
{
return this._x * otherVector._x + this._y * otherVector._y;
}
public static MyVector operator +(MyVector leftVector, MyVector rightVector)
{
return new MyVector(leftVector._x + rightVector._x, leftVector._y + rightVector._y);
}
public static MyVector operator -(MyVector leftVector, MyVector rightVector)
{
return new MyVector(leftVector._x - rightVector._x, leftVector._y - rightVector._y);
}
public static MyVector operator *(MyVector aVector, double aScalar)
{
return new MyVector(aVector._x * aScalar, aVector._y * aScalar);
}
// Added using ReSharper due to CodeAnalysis nagging
public bool Equals(MyVector other)
{
return _x.Equals(other._x) && _y.Equals(other._y);
}
public override bool Equals(object obj)
{
if (ReferenceEquals(null, obj)) return false;
return obj is MyVector && Equals((MyVector) obj);
}
public override int GetHashCode()
{
unchecked
{
return (_x.GetHashCode()*397) ^ _y.GetHashCode();
}
}
public static bool operator ==(MyVector left, MyVector right)
{
return left.Equals(right);
}
public static bool operator !=(MyVector left, MyVector right)
{
return !left.Equals(right);
}
}
И вот небольшая тестовая программа.
public static class JustTesting
{
public static void Main()
{
Stopwatch stopwatch = new Stopwatch();
stopwatch.Start();
for (int i = 0; i < 10000000; i++)
{
TestIt(1, 0, 0, 0, 1, 1, 0.70710678118654757);
TestIt(5, 4, 0, 0, 20, 10, 1.3416407864998738);
TestIt(30, 15, 0, 0, 20, 10, 11.180339887498949);
TestIt(-30, 15, 0, 0, 20, 10, 33.541019662496844);
TestIt(5, 1, 0, 0, 10, 0, 1.0);
TestIt(1, 5, 0, 0, 0, 10, 1.0);
}
stopwatch.Stop();
TimeSpan timeSpan = stopwatch.Elapsed;
}
private static void TestIt(float aPointX, float aPointY,
float lineSegmentPoint1X, float lineSegmentPoint1Y,
float lineSegmentPoint2X, float lineSegmentPoint2Y,
double expectedAnswer)
{
// Katz
double d1 = DistanceFromPointToLineSegment(new MyVector(aPointX, aPointY),
new MyVector(lineSegmentPoint1X, lineSegmentPoint1Y),
new MyVector(lineSegmentPoint2X, lineSegmentPoint2Y));
Debug.Assert(d1 == expectedAnswer);
/*
// Katz using squared distance
double d2 = DistanceFromPointToLineSegmentSquared(new MyVector(aPointX, aPointY),
new MyVector(lineSegmentPoint1X, lineSegmentPoint1Y),
new MyVector(lineSegmentPoint2X, lineSegmentPoint2Y));
Debug.Assert(Math.Abs(d2 - expectedAnswer * expectedAnswer) < 1E-7f);
*/
/*
// Matti (optimized)
double d3 = FloatVector.DistanceToLineSegment(new PointF(aPointX, aPointY),
new PointF(lineSegmentPoint1X, lineSegmentPoint1Y),
new PointF(lineSegmentPoint2X, lineSegmentPoint2Y));
Debug.Assert(Math.Abs(d3 - expectedAnswer) < 1E-7f);
*/
}
private static double DistanceFromPointToLineSegment(MyVector aPoint,
MyVector lineSegmentPoint1, MyVector lineSegmentPoint2)
{
MyVector closestPoint; // Not used
return aPoint.DistanceToLineSegment(lineSegmentPoint1, lineSegmentPoint2,
out closestPoint);
}
private static double DistanceFromPointToLineSegmentSquared(MyVector aPoint,
MyVector lineSegmentPoint1, MyVector lineSegmentPoint2)
{
MyVector closestPoint; // Not used
return aPoint.DistanceToLineSegmentSquared(lineSegmentPoint1, lineSegmentPoint2,
out closestPoint);
}
}
Как вы можете видеть, я попытался измерить разницу между использованием версии, которая избегает метода Sqrt(), и обычной версией. Мои тесты показывают, что, возможно, вы можете сэкономить около 2,5%, но я даже не уверен в этом - различия в различных тестовых прогонах были одного порядка. Я также попытался измерить версию, опубликованную Матти (плюс очевидная оптимизация), и эта версия, кажется, примерно на 4% медленнее, чем версия, основанная на коде Каца / Грумдрига.
Изменить: Кстати, я также попытался измерить метод, который находит расстояние до бесконечной линии (не отрезок линии) с использованием кросс-произведения (и Sqrt()), и это примерно на 32% быстрее.
Закодировано в t-sql
точка (@px, @py) и отрезок линии проходит от (@ax, @ay) до (@bx, @by)
create function fn_sqr (@NumberToSquare decimal(18,10))
returns decimal(18,10)
as
begin
declare @Result decimal(18,10)
set @Result = @NumberToSquare * @NumberToSquare
return @Result
end
go
create function fn_Distance(@ax decimal (18,10) , @ay decimal (18,10), @bx decimal(18,10), @by decimal(18,10))
returns decimal(18,10)
as
begin
declare @Result decimal(18,10)
set @Result = (select dbo.fn_sqr(@ax - @bx) + dbo.fn_sqr(@ay - @by) )
return @Result
end
go
create function fn_DistanceToSegmentSquared(@px decimal(18,10), @py decimal(18,10), @ax decimal(18,10), @ay decimal(18,10), @bx decimal(18,10), @by decimal(18,10))
returns decimal(18,10)
as
begin
declare @l2 decimal(18,10)
set @l2 = (select dbo.fn_Distance(@ax, @ay, @bx, @by))
if @l2 = 0
return dbo.fn_Distance(@px, @py, @ax, @ay)
declare @t decimal(18,10)
set @t = ((@px - @ax) * (@bx - @ax) + (@py - @ay) * (@by - @ay)) / @l2
if (@t < 0)
return dbo.fn_Distance(@px, @py, @ax, @ay);
if (@t > 1)
return dbo.fn_Distance(@px, @py, @bx, @by);
return dbo.fn_Distance(@px, @py, @ax + @t * (@bx - @ax), @ay + @t * (@by - @ay))
end
go
create function fn_DistanceToSegment(@px decimal(18,10), @py decimal(18,10), @ax decimal(18,10), @ay decimal(18,10), @bx decimal(18,10), @by decimal(18,10))
returns decimal(18,10)
as
begin
return sqrt(dbo.fn_DistanceToSegmentSquared(@px, @py , @ax , @ay , @bx , @by ))
end
go
--example execution for distance from a point at (6,1) to line segment that runs from (4,2) to (2,1)
select dbo.fn_DistanceToSegment(6, 1, 4, 2, 2, 1)
--result = 2.2360679775
--example execution for distance from a point at (-3,-2) to line segment that runs from (0,-2) to (-2,1)
select dbo.fn_DistanceToSegment(-3, -2, 0, -2, -2, 1)
--result = 2.4961508830
--example execution for distance from a point at (0,-2) to line segment that runs from (0,-2) to (-2,1)
select dbo.fn_DistanceToSegment(0,-2, 0, -2, -2, 1)
--result = 0.0000000000
С# версия
public static FP DistanceToLineSegment(FPVector3 a, FPVector3 b, FPVector3 point)
{
var d = b - a;
var s = d.SqrMagnitude;
var ds = d / s;
var lambda = FPVector3.Dot(point - a, ds);
var p = FPMath.Clamp01(lambda) * d;
return (a + p - point).Magnitude;
}
2D и 3D решение
Рассмотрим изменение базы таким образом, что отрезок линии становится (0, 0, 0)-(d, 0, 0) и точка (u, v, 0), Кратчайшее расстояние происходит в этой плоскости и определяется как
u ≤ 0 -> d(A, C)
0 ≤ u ≤ d -> |v|
d ≤ u -> d(B, C)
(Расстояние до одной из конечных точек или к опорной линии, в зависимости от проекции линии. ISO-расстояние локус состоит из двух полукругов и двух отрезков.)
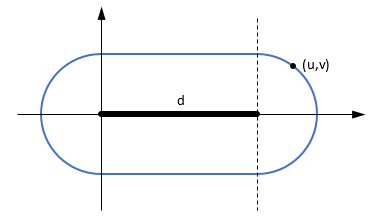
В вышеприведенном выражении d - длина отрезка AB, а u, v - соответственно скалярное произведение и (модуль) перекрестное произведение AB/d (единичный вектор в направлении AB) и AC. Следовательно, в векторе
AB.AC ≤ 0 -> |AC|
0 ≤ AB.AC ≤ AB² -> |ABxAC|/|AB|
AB² ≤ AB.AC -> |BC|
Вот версия devnullicus's C++, преобразованная в C#. Для моей реализации мне нужно было знать точку пересечения и найти его решение, чтобы хорошо работать.
public static bool PointSegmentDistanceSquared(PointF point, PointF lineStart, PointF lineEnd, out double distance, out PointF intersectPoint)
{
const double kMinSegmentLenSquared = 0.00000001; // adjust to suit. If you use float, you'll probably want something like 0.000001f
const double kEpsilon = 1.0E-14; // adjust to suit. If you use floats, you'll probably want something like 1E-7f
double dX = lineEnd.X - lineStart.X;
double dY = lineEnd.Y - lineStart.Y;
double dp1X = point.X - lineStart.X;
double dp1Y = point.Y - lineStart.Y;
double segLenSquared = (dX * dX) + (dY * dY);
double t = 0.0;
if (segLenSquared >= -kMinSegmentLenSquared && segLenSquared <= kMinSegmentLenSquared)
{
// segment is a point.
intersectPoint = lineStart;
t = 0.0;
distance = ((dp1X * dp1X) + (dp1Y * dp1Y));
}
else
{
// Project a line from p to the segment [p1,p2]. By considering the line
// extending the segment, parameterized as p1 + (t * (p2 - p1)),
// we find projection of point p onto the line.
// It falls where t = [(p - p1) . (p2 - p1)] / |p2 - p1|^2
t = ((dp1X * dX) + (dp1Y * dY)) / segLenSquared;
if (t < kEpsilon)
{
// intersects at or to the "left" of first segment vertex (lineStart.X, lineStart.Y). If t is approximately 0.0, then
// intersection is at p1. If t is less than that, then there is no intersection (i.e. p is not within
// the 'bounds' of the segment)
if (t > -kEpsilon)
{
// intersects at 1st segment vertex
t = 0.0;
}
// set our 'intersection' point to p1.
intersectPoint = lineStart;
// Note: If you wanted the ACTUAL intersection point of where the projected lines would intersect if
// we were doing PointLineDistanceSquared, then intersectPoint.X would be (lineStart.X + (t * dx)) and intersectPoint.Y would be (lineStart.Y + (t * dy)).
}
else if (t > (1.0 - kEpsilon))
{
// intersects at or to the "right" of second segment vertex (lineEnd.X, lineEnd.Y). If t is approximately 1.0, then
// intersection is at p2. If t is greater than that, then there is no intersection (i.e. p is not within
// the 'bounds' of the segment)
if (t < (1.0 + kEpsilon))
{
// intersects at 2nd segment vertex
t = 1.0;
}
// set our 'intersection' point to p2.
intersectPoint = lineEnd;
// Note: If you wanted the ACTUAL intersection point of where the projected lines would intersect if
// we were doing PointLineDistanceSquared, then intersectPoint.X would be (lineStart.X + (t * dx)) and intersectPoint.Y would be (lineStart.Y + (t * dy)).
}
else
{
// The projection of the point to the point on the segment that is perpendicular succeeded and the point
// is 'within' the bounds of the segment. Set the intersection point as that projected point.
intersectPoint = new PointF((float)(lineStart.X + (t * dX)), (float)(lineStart.Y + (t * dY)));
}
// return the squared distance from p to the intersection point. Note that we return the squared distance
// as an optimization because many times you just need to compare relative distances and the squared values
// works fine for that. If you want the ACTUAL distance, just take the square root of this value.
double dpqX = point.X - intersectPoint.X;
double dpqY = point.Y - intersectPoint.Y;
distance = ((dpqX * dpqX) + (dpqY * dpqY));
}
return true;
}
Я не видел здесь реализацию Java, поэтому я перевел функцию Javascript с принятого ответа на код Java:
static double sqr(double x) {
return x * x;
}
static double dist2(DoublePoint v, DoublePoint w) {
return sqr(v.x - w.x) + sqr(v.y - w.y);
}
static double distToSegmentSquared(DoublePoint p, DoublePoint v, DoublePoint w) {
double l2 = dist2(v, w);
if (l2 == 0) return dist2(p, v);
double t = ((p.x - v.x) * (w.x - v.x) + (p.y - v.y) * (w.y - v.y)) / l2;
if (t < 0) return dist2(p, v);
if (t > 1) return dist2(p, w);
return dist2(p, new DoublePoint(
v.x + t * (w.x - v.x),
v.y + t * (w.y - v.y)
));
}
static double distToSegment(DoublePoint p, DoublePoint v, DoublePoint w) {
return Math.sqrt(distToSegmentSquared(p, v, w));
}
static class DoublePoint {
public double x;
public double y;
public DoublePoint(double x, double y) {
this.x = x;
this.y = y;
}
}
См. набор инструментов Matlab GEOMETRY на следующем веб-сайте: http://people.sc.fsu.edu/~jburkardt/m_src/geometry/geometry.html
Ctrl+ F и введите "сегмент", чтобы найти функции, связанные с сегментом линии. функции "plot_point_dist_2d.m" и "gment_point_dist_3d.m"- это то, что вам нужно.
Коды GEOMETRY доступны в версии C и версии C++, а также в версии FORTRAN77, в версии FORTRAN90 и в версии MATLAB.
Реализация Python Numpy для 2D координатного массива:
import numpy as np
def dist2d(p1, p2, coords):
''' Distance from points to a finite line btwn p1 -> p2 '''
assert coords.ndim == 2 and coords.shape[1] == 2, 'coords is not 2 dim'
dp = p2 - p1
st = dp[0]**2 + dp[1]**2
u = ((coords[:, 0] - p1[0]) * dp[0] + (coords[:, 1] - p1[1]) * dp[1]) / st
u[u > 1.] = 1.
u[u < 0.] = 0.
dx = (p1[0] + u * dp[0]) - coords[:, 0]
dy = (p1[1] + u * dp[1]) - coords[:, 1]
return np.sqrt(dx**2 + dy**2)
# Usage:
p1 = np.array([0., 0.])
p2 = np.array([0., 10.])
# List of coordinates
coords = np.array(
[[0., 0.],
[5., 5.],
[10., 10.],
[20., 20.]
])
d = dist2d(p1, p2, coords)
# Single coordinate
coord = np.array([25., 25.])
d = dist2d(p1, p2, coord[np.newaxis, :])
Принятый ответ не работает (например, расстояние между 0,0 и (-10,2,10,2) должно быть 2).
вот код, который работает:
def dist2line2(x,y,line):
x1,y1,x2,y2=line
vx = x1 - x
vy = y1 - y
ux = x2-x1
uy = y2-y1
length = ux * ux + uy * uy
det = (-vx * ux) + (-vy * uy) #//if this is < 0 or > length then its outside the line segment
if det < 0:
return (x1 - x)**2 + (y1 - y)**2
if det > length:
return (x2 - x)**2 + (y2 - y)**2
det = ux * vy - uy * vx
return det**2 / length
def dist2line(x,y,line): return math.sqrt(dist2line2(x,y,line))
Я сделал интерактивный график Desmos, чтобы продемонстрировать, как этого добиться:
https://www.desmos.com/calculator/kswrm8ddum
Красная точка A, зеленая точка B, а точка C синяя. Вы можете перетащить точки на графике, чтобы увидеть изменение значений. Слева, значение 's' является параметром отрезка (т.е. s = 0 означает точку A, а s = 1 означает точку B). Значение "d" - это расстояние от третьей точки до линии, проходящей через А и В.
РЕДАКТИРОВАТЬ:
Забавно, немного понимания: координата (s, d) - это координата третьей точки C в системе координат, где AB - это единица измерения по оси X, а ось Y - перпендикулярно AB.
Версия AutoHotkeys, основанная на Javascript Джошуа:
plDist(x, y, x1, y1, x2, y2) {
A:= x - x1
B:= y - y1
C:= x2 - x1
D:= y2 - y1
dot:= A*C + B*D
sqLen:= C*C + D*D
param:= dot / sqLen
if (param < 0 || ((x1 = x2) && (y1 = y2))) {
xx:= x1
yy:= y1
} else if (param > 1) {
xx:= x2
yy:= y2
} else {
xx:= x1 + param*C
yy:= y1 + param*D
}
dx:= x - xx
dy:= y - yy
return sqrt(dx*dx + dy*dy)
}