Как рассчитать размер прямоугольника, который виден камере по заданной координате?
Я сделал небольшое приложение three.js, которое перемещает круг из нижней части холста в верхнюю часть:
let renderer, scene, light, circles, camera;
initialize();
animate();
function initialize() {
renderer = new THREE.WebGLRenderer({ alpha: true, antialias: true });
renderer.setSize(window.innerWidth, window.innerHeight);
document.body.appendChild(renderer.domElement);
scene = new THREE.Scene();
light = new THREE.AmbientLight();
scene.add(light);
circles = new THREE.Group();
scene.add(circles);
camera = new THREE.PerspectiveCamera(45, renderer.domElement.clientWidth / renderer.domElement.clientHeight, 1);
camera.position.z = circles.position.z + 500;
}
function animate() {
// Update each circle.
Array.from(circles.children).forEach(circle => {
if (circle.position.y < visibleBox(circle.position.z).max.y) {
circle.position.y += 4;
} else {
circles.remove(circle);
}
});
// Create a new circle.
let circle = new THREE.Mesh();
circle.geometry = new THREE.CircleGeometry(30, 30);
circle.material = new THREE.MeshToonMaterial({ color: randomColor(), transparent: true, opacity: 0.5 });
circle.position.z = _.random(camera.position.z - camera.far, camera.position.z - (camera.far / 10));
circle.position.x = _.random(visibleBox(circle.position.z).min.x, visibleBox(circle.position.z).max.x);
circle.position.y = visibleBox(circle.position.z).min.y;
circles.add(circle);
// Render the scene.
renderer.render(scene, camera);
requestAnimationFrame(animate);
}
function visibleBox(z) {
return new THREE.Box2(
new THREE.Vector2(-1000, -1000),
new THREE.Vector2(1000, 1000)
);
}
function randomColor() {
return `#${ _.sampleSize("abcdef0123456789", 6).join("")}`;
}body {
width: 100%;
height: 100%;
overflow: hidden;
}<script src="https://cdnjs.cloudflare.com/ajax/libs/three.js/87/three.js">
</script>
<script src="https://cdnjs.cloudflare.com/ajax/libs/lodash.js/4.17.4/lodash.min.js">
</script>Я использую функцию visibleBox(z) определить, где создать и уничтожить каждый круг. Я жестко закодировал возвращаемое значение для этой функции, но вместо этого я хотел бы, чтобы он вычислял размер прямоугольника, который виден камере на заданной глубине, z,

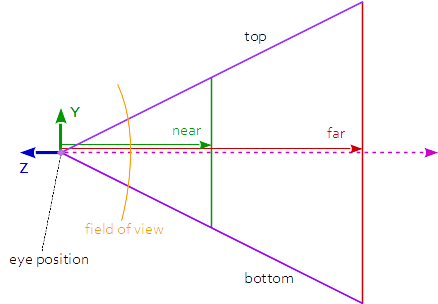
Другими словами, я хочу, чтобы каждый круг создавался точно в нижней части усеченной камеры (нижний край красного прямоугольника на изображении выше) и уничтожался точно, когда он достигал верхней части усеченного конуса (верхний край красный прямоугольник).
Итак, как мне вычислить этот прямоугольник?
1 ответ
Измените функцию следующим образом:
function visibleBox(z) {
var t = Math.tan( THREE.Math.degToRad( camera.fov ) / 2 )
var h = t * 2 * z;
var w = h * camera.aspect;
return new THREE.Box2(new THREE.Vector2(-w, h), new THREE.Vector2(w, -h));
}
И установите положение круга следующим образом:
circle.position.z = _.random(-camera.near, -camera.far);
var visBox = visibleBox(circle.position.z)
circle.position.x = _.random(visBox.min.x, visBox.max.x);
circle.position.y = visBox.min.y;
Демонстрация кода:
let renderer, scene, light, circles, camera;
initialize();
animate();
function initialize() {
renderer = new THREE.WebGLRenderer({ alpha: true, antialias: true });
renderer.setSize(window.innerWidth, window.innerHeight);
document.body.appendChild(renderer.domElement);
scene = new THREE.Scene();
light = new THREE.AmbientLight();
scene.add(light);
circles = new THREE.Group();
scene.add(circles);
camera = new THREE.PerspectiveCamera(45, renderer.domElement.clientWidth / renderer.domElement.clientHeight, 1);
camera.position.z = circles.position.z + 500;
}
function animate() {
// Update each circle.
Array.from(circles.children).forEach(circle => {
if (circle.position.y < visibleBox(circle.position.z).max.y) {
circle.position.y += 4;
} else {
circles.remove(circle);
}
});
// Create a new circle.
let circle = new THREE.Mesh();
circle.geometry = new THREE.CircleGeometry(30, 30);
circle.material = new THREE.MeshToonMaterial({ color: randomColor(), transparent: true, opacity: 0.5 });
circle.position.z = _.random(-(camera.near+(camera.far-camera.near)/5), -camera.far);
var visBox = visibleBox(circle.position.z)
circle.position.x = _.random(visBox.min.x, visBox.max.x);
circle.position.y = visBox.min.y;
circles.add(circle);
// Render the scene.
renderer.render(scene, camera);
requestAnimationFrame(animate);
}
function visibleBox(z) {
var t = Math.tan( THREE.Math.degToRad( camera.fov ) / 2 )
var h = t * 2 * z;
var w = h * camera.aspect;
return new THREE.Box2(new THREE.Vector2(-w, h), new THREE.Vector2(w, -h));
}
function randomColor() {
return `#${ _.sampleSize("abcdef0123456789", 6).join("")}`;
}<script src="https://cdnjs.cloudflare.com/ajax/libs/three.js/87/three.js">
</script>
<script src="https://cdnjs.cloudflare.com/ajax/libs/lodash.js/4.17.4/lodash.min.js">
</script>объяснение
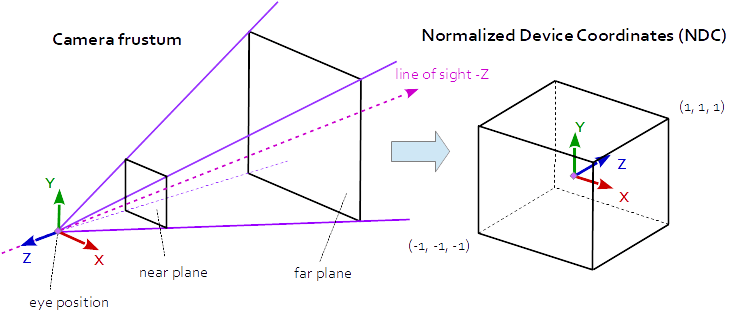
Матрица проекции описывает отображение от трехмерных точек сцены к двухмерным точкам области просмотра. Он преобразуется из пространства глаза в пространство клипа, а координаты в пространстве клипа преобразуются в нормализованные координаты устройства (NDC) путем деления на w компонент координат клипа. НДЦ находятся в диапазоне (-1,-1,-1) - (1,1,1).
В перспективной проекции соотношение между значением глубины и расстоянием z до камеры не является линейным.
Матрица перспективной проекции выглядит так:
r = right, l = left, b = bottom, t = top, n = near, f = far
2*n/(r-l) 0 0 0
0 2*n/(t-b) 0 0
(r+l)/(r-l) (t+b)/(t-b) -(f+n)/(f-n) -1
0 0 -2*f*n/(f-n) 0
Из этого следует соотношение между координатой z в пространстве вида и нормализованными координатами устройства z, компонентом и глубиной.
z_ndc = ( -z_eye * (f+n)/(f-n) - 2*f*n/(f-n) ) / -z_eye
depth = (z_ndc + 1.0) / 2.0
Обратная операция выглядит так:
n = near, f = far
z_ndc = 2.0 * depth - 1.0;
z_eye = 2.0 * n * f / (f + n - z_ndc * (f - n));
Если матрица перспективной проекции известна, это можно сделать следующим образом:
A = prj_mat[2][2]
B = prj_mat[3][2]
z_eye = B / (A + z_ndc)
См. Как визуализировать глубину линейно в современном OpenGL с gl_FragCoord.z во фрагментном шейдере?
Реальность между проецируемой областью в пространстве вида и координатой Z пространства вида является линейной. Это зависит от угла поля зрения и соотношения сторон.
Нормализованный размер устройства может быть преобразован в размер в пространстве вида следующим образом:
aspect = w / h
tanFov = tan( fov_y * 0.5 );
size_x = ndx_size_x * (tanFov * aspect) / z_eye;
size_y = ndx_size_y * tanFov / z_eye;
если матрица перспективной проекции известна и проекция симметрична (линия визирования находится в центре области просмотра, а поле обзора не смещено), это можно сделать следующим образом:
size_x = ndx_size_x * / (prj_mat[0][0] * z_eye);
size_y = ndx_size_y * / (prj_mat[1][1] * z_eye);
См. Поле зрения + Соотношение сторон + Матрица вида из матрицы проекции (HMD OST Calibration)
Обратите внимание, что каждая позиция в нормализованных координатах устройства может быть преобразована для просмотра пространственных координат с помощью матрицы обратной проекции:
mat4 inversePrjMat = inverse( prjMat );
vec4 viewPosH = inversePrjMat * vec3( ndc_x, ndc_y, 2.0 * depth - 1.0, 1.0 );
vec3 viewPos = viewPos.xyz / viewPos.w;
Это означает, что непроецированный прямоугольник с определенной глубиной может быть рассчитан следующим образом:
vec4 viewLowerLeftH = inversePrjMat * vec3( -1.0, -1.0, 2.0 * depth - 1.0, 1.0 );
vec4 viewUpperRightH = inversePrjMat * vec3( 1.0, 1.0, 2.0 * depth - 1.0, 1.0 );
vec3 viewLowerLeft = viewLowerLeftH.xyz / viewLowerLeftH.w;
vec3 viewUpperRight = viewUpperRightH.xyz / viewUpperRightH.w;