Программная коррекция "рыбьего глаза"
ОБНОВЛЕНИЕ СТАТУСА КОРПУСА:
Я обнаружил, как отобразить линейную линзу из destination координаты source координаты.
Как рассчитать радиальное расстояние от центра, чтобы перейти от рыбий глаз к прямолинейному?
1). Я на самом деле изо всех сил, чтобы изменить его и сопоставить исходные координаты с координатами пункта назначения. Что обратного в коде в стиле конвертируемых мной функций?
2). Я также вижу, что мое искажение несовершенно на некоторых объективах - предположительно, на тех, которые не являются строго линейными. Что эквивалентно исходным и целевым координатам этих объективов? Опять же, больше кода, чем просто математические формулы, пожалуйста...
Вопрос, как первоначально заявлено:
У меня есть некоторые моменты, которые описывают положения на фотографии, снятой объективом "рыбий глаз".
Я хочу преобразовать эти точки в прямолинейные координаты. Я хочу не искажать изображение.
Я нашел это описание того, как генерировать эффект "рыбий глаз", но не как его обратить.
Есть также пост в блоге, который описывает, как использовать инструменты, чтобы сделать это; эти картинки от того:
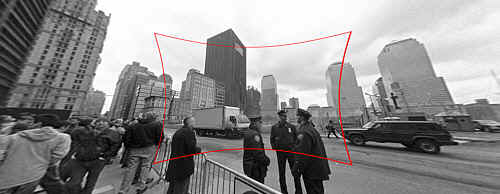
(1): SOURCE Оригинальная ссылка на фото 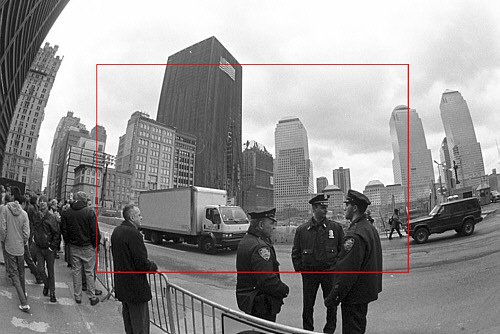
Вход: исходное изображение с искажением "рыбий глаз" для исправления.
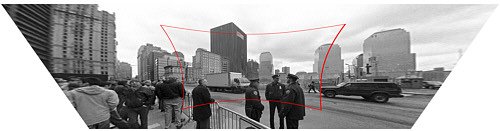
(2): DESTINATION Оригинальная ссылка на фото 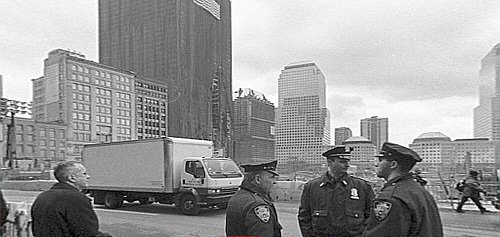
Вывод: исправленное изображение (технически также с коррекцией перспективы, но это отдельный шаг).
Как рассчитать радиальное расстояние от центра, чтобы перейти от рыбий глаз к прямолинейному?
Моя функция заглушки выглядит так:
Point correct_fisheye(const Point& p,const Size& img) {
// to polar
const Point centre = {img.width/2,img.height/2};
const Point rel = {p.x-centre.x,p.y-centre.y};
const double theta = atan2(rel.y,rel.x);
double R = sqrt((rel.x*rel.x)+(rel.y*rel.y));
// fisheye undistortion in here please
//... change R ...
// back to rectangular
const Point ret = Point(centre.x+R*cos(theta),centre.y+R*sin(theta));
fprintf(stderr,"(%d,%d) in (%d,%d) = %f,%f = (%d,%d)\n",p.x,p.y,img.width,img.height,theta,R,ret.x,ret.y);
return ret;
}
В качестве альтернативы, я мог бы как-то преобразовать изображение из "рыбьего глаза" в прямолинейное, прежде чем находить точки, но я полностью озадачен документацией OpenCV. Есть ли простой способ сделать это в OpenCV, и достаточно ли он эффективен, чтобы сделать это в прямом эфире видео?
7 ответов
В описании, которое вы упоминаете, говорится, что проекция с помощью камеры с точечным отверстием (та, которая не вносит искажения объектива) моделируется
R_u = f*tan(theta)
и проекция обычными камерами "рыбий глаз" (то есть искаженными) моделируется
R_d = 2*f*sin(theta/2)
Вы уже знаете R_d и theta, и если бы вы знали фокусное расстояние камеры (обозначенное как f), то исправление изображения будет равносильно вычислению R_u в терминах R_d и theta. Другими словами,
R_u = f*tan(2*asin(R_d/(2*f)))
это формула, которую вы ищете. Оценка фокусного расстояния f может быть решена путем калибровки камеры или других средств, таких как предоставление пользователю возможности обратной связи о том, насколько хорошо исправлено изображение, или использование знаний из исходной сцены.
Чтобы решить ту же проблему с помощью OpenCV, вам необходимо получить внутренние параметры камеры и коэффициенты искажения объектива. См., Например, главу 11 " Изучение OpenCV" (не забудьте проверить исправление). Затем вы можете использовать такую программу (написанную с привязками Python для OpenCV), чтобы обратить искажение линзы:
#!/usr/bin/python
# ./undistort 0_0000.jpg 1367.451167 1367.451167 0 0 -0.246065 0.193617 -0.002004 -0.002056
import sys
import cv
def main(argv):
if len(argv) < 10:
print 'Usage: %s input-file fx fy cx cy k1 k2 p1 p2 output-file' % argv[0]
sys.exit(-1)
src = argv[1]
fx, fy, cx, cy, k1, k2, p1, p2, output = argv[2:]
intrinsics = cv.CreateMat(3, 3, cv.CV_64FC1)
cv.Zero(intrinsics)
intrinsics[0, 0] = float(fx)
intrinsics[1, 1] = float(fy)
intrinsics[2, 2] = 1.0
intrinsics[0, 2] = float(cx)
intrinsics[1, 2] = float(cy)
dist_coeffs = cv.CreateMat(1, 4, cv.CV_64FC1)
cv.Zero(dist_coeffs)
dist_coeffs[0, 0] = float(k1)
dist_coeffs[0, 1] = float(k2)
dist_coeffs[0, 2] = float(p1)
dist_coeffs[0, 3] = float(p2)
src = cv.LoadImage(src)
dst = cv.CreateImage(cv.GetSize(src), src.depth, src.nChannels)
mapx = cv.CreateImage(cv.GetSize(src), cv.IPL_DEPTH_32F, 1)
mapy = cv.CreateImage(cv.GetSize(src), cv.IPL_DEPTH_32F, 1)
cv.InitUndistortMap(intrinsics, dist_coeffs, mapx, mapy)
cv.Remap(src, dst, mapx, mapy, cv.CV_INTER_LINEAR + cv.CV_WARP_FILL_OUTLIERS, cv.ScalarAll(0))
# cv.Undistort2(src, dst, intrinsics, dist_coeffs)
cv.SaveImage(output, dst)
if __name__ == '__main__':
main(sys.argv)
Также обратите внимание, что OpenCV использует модель искажения объектива, совершенно отличную от модели на веб-странице, на которую вы ссылаетесь.
(Оригинальный постер, предоставляющий альтернативу)
Следующая функция отображает координаты назначения (прямолинейные) на исходные (искаженные рыбьим глазом) координаты. (Я был бы признателен за помощь в обратном направлении)
Я пришел к этому моменту методом проб и ошибок: я принципиально не понимаю, почему этот код работает, объяснения и повышение точности приветствуются!
def dist(x,y):
return sqrt(x*x+y*y)
def correct_fisheye(src_size,dest_size,dx,dy,factor):
""" returns a tuple of source coordinates (sx,sy)
(note: values can be out of range)"""
# convert dx,dy to relative coordinates
rx, ry = dx-(dest_size[0]/2), dy-(dest_size[1]/2)
# calc theta
r = dist(rx,ry)/(dist(src_size[0],src_size[1])/factor)
if 0==r:
theta = 1.0
else:
theta = atan(r)/r
# back to absolute coordinates
sx, sy = (src_size[0]/2)+theta*rx, (src_size[1]/2)+theta*ry
# done
return (int(round(sx)),int(round(sy)))
При использовании с коэффициентом 3,0 он успешно деформирует изображения, используемые в качестве примеров (я не пытался провести качественную интерполяцию):
Мертвая ссылка
(А это из поста в блоге, для сравнения:)

Если вы думаете, что ваши формулы точны, вы можете вычислить точную формулу с помощью трига, например так:
Rin = 2 f sin(w/2) -> sin(w/2)= Rin/2f
Rout= f tan(w) -> tan(w)= Rout/f
(Rin/2f)^2 = [sin(w/2)]^2 = (1 - cos(w))/2 -> cos(w) = 1 - 2(Rin/2f)^2
(Rout/f)^2 = [tan(w)]^2 = 1/[cos(w)]^2 - 1
-> (Rout/f)^2 = 1/(1-2[Rin/2f]^2)^2 - 1
Однако, как говорит @jmbr, фактическое искажение камеры будет зависеть от объектива и масштаба. Вместо того, чтобы полагаться на фиксированную формулу, вы можете попробовать полиномиальное расширение:
Rout = Rin*(1 + A*Rin^2 + B*Rin^4 + ...)
Изменяя сначала A, а затем коэффициенты высшего порядка, вы можете вычислить любую разумную локальную функцию (форма разложения использует симметрию задачи). В частности, должна быть возможность вычислить начальные коэффициенты для аппроксимации теоретической функции выше.
Кроме того, для получения хороших результатов вам необходимо использовать интерполяционный фильтр для генерации исправленного изображения. Пока искажение не слишком велико, вы можете использовать тип фильтра, который вы бы использовали для линейного изменения масштаба изображения без особых проблем.
Отредактируйте: согласно вашему запросу эквивалентный масштабный коэффициент для приведенной выше формулы:
(Rout/f)^2 = 1/(1-2[Rin/2f]^2)^2 - 1
-> Rout/f = [Rin/f] * sqrt(1-[Rin/f]^2/4)/(1-[Rin/f]^2/2)
Если вы построите приведенную выше формулу рядом с загаром (Rin/f), вы увидите, что они очень похожи по форме. По сути, искажение касательной становится серьезным до того, как грех (w) сильно отличается от w.
Обратная формула должна выглядеть примерно так:
Rin/f = [Rout/f] / sqrt( sqrt(([Rout/f]^2+1) * (sqrt([Rout/f]^2+1) + 1) / 2 )
Я взял то, что сделал JMBR, и, по сути, изменил его. Он взял радиус искаженного изображения (R d, то есть расстояние в пикселях от центра изображения) и нашел формулу для Ru, радиуса неискаженного изображения.
Вы хотите пойти другим путем. Для каждого пикселя в неискаженном (обработанном изображении) вы хотите знать, что представляет собой соответствующий пиксель в искаженном изображении. Другими словами, дано (xu, yu) -> (xd, yd). Затем вы заменяете каждый пиксель в неискаженном изображении соответствующим пикселем из искаженного изображения.
Начиная с того, что сделал JMBR, я делаю наоборот, находя R d как функцию Ru. Я получил:
Rd = f * sqrt(2) * sqrt( 1 - 1/sqrt(r^2 +1))
где f - фокусное расстояние в пикселях (я объясню позже), и r = Ru/f,
Фокусное расстояние для моей камеры было 2,5 мм. Размер каждого пикселя на моей ПЗС был квадратным 6 мкм. Таким образом, f было 2500/6 = 417 пикселей. Это можно найти методом проб и ошибок.
Поиск R d позволяет найти соответствующий пиксель в искаженном изображении, используя полярные координаты.
Угол каждого пикселя от центральной точки одинаков:
theta = arctan( (yu-yc)/(xu-xc) ) где xc, yc - центральные точки.
Затем,
xd = Rd * cos(theta) + xc
yd = Rd * sin(theta) + yc
Убедитесь, что вы знаете, в каком квадранте вы находитесь.
Вот код C#, который я использовал
public class Analyzer
{
private ArrayList mFisheyeCorrect;
private int mFELimit = 1500;
private double mScaleFESize = 0.9;
public Analyzer()
{
//A lookup table so we don't have to calculate Rdistorted over and over
//The values will be multiplied by focal length in pixels to
//get the Rdistorted
mFisheyeCorrect = new ArrayList(mFELimit);
//i corresponds to Rundist/focalLengthInPixels * 1000 (to get integers)
for (int i = 0; i < mFELimit; i++)
{
double result = Math.Sqrt(1 - 1 / Math.Sqrt(1.0 + (double)i * i / 1000000.0)) * 1.4142136;
mFisheyeCorrect.Add(result);
}
}
public Bitmap RemoveFisheye(ref Bitmap aImage, double aFocalLinPixels)
{
Bitmap correctedImage = new Bitmap(aImage.Width, aImage.Height);
//The center points of the image
double xc = aImage.Width / 2.0;
double yc = aImage.Height / 2.0;
Boolean xpos, ypos;
//Move through the pixels in the corrected image;
//set to corresponding pixels in distorted image
for (int i = 0; i < correctedImage.Width; i++)
{
for (int j = 0; j < correctedImage.Height; j++)
{
//which quadrant are we in?
xpos = i > xc;
ypos = j > yc;
//Find the distance from the center
double xdif = i-xc;
double ydif = j-yc;
//The distance squared
double Rusquare = xdif * xdif + ydif * ydif;
//the angle from the center
double theta = Math.Atan2(ydif, xdif);
//find index for lookup table
int index = (int)(Math.Sqrt(Rusquare) / aFocalLinPixels * 1000);
if (index >= mFELimit) index = mFELimit - 1;
//calculated Rdistorted
double Rd = aFocalLinPixels * (double)mFisheyeCorrect[index]
/mScaleFESize;
//calculate x and y distances
double xdelta = Math.Abs(Rd*Math.Cos(theta));
double ydelta = Math.Abs(Rd * Math.Sin(theta));
//convert to pixel coordinates
int xd = (int)(xc + (xpos ? xdelta : -xdelta));
int yd = (int)(yc + (ypos ? ydelta : -ydelta));
xd = Math.Max(0, Math.Min(xd, aImage.Width-1));
yd = Math.Max(0, Math.Min(yd, aImage.Height-1));
//set the corrected pixel value from the distorted image
correctedImage.SetPixel(i, j, aImage.GetPixel(xd, yd));
}
}
return correctedImage;
}
}
Я нашел этот файл PDF, и я доказал, что математика верна (за исключением строки vd = *xd**fv+v0 which should say vd = **yd**+fv+v0).
http://perception.inrialpes.fr/CAVA_Dataset/Site/files/Calibration_OpenCV.pdf
Он не использует все последние коэффициенты, которые есть у OpenCV, но я уверен, что он может быть адаптирован довольно легко.
double k1 = cameraIntrinsic.distortion[0];
double k2 = cameraIntrinsic.distortion[1];
double p1 = cameraIntrinsic.distortion[2];
double p2 = cameraIntrinsic.distortion[3];
double k3 = cameraIntrinsic.distortion[4];
double fu = cameraIntrinsic.focalLength[0];
double fv = cameraIntrinsic.focalLength[1];
double u0 = cameraIntrinsic.principalPoint[0];
double v0 = cameraIntrinsic.principalPoint[1];
double u, v;
u = thisPoint->x; // the undistorted point
v = thisPoint->y;
double x = ( u - u0 )/fu;
double y = ( v - v0 )/fv;
double r2 = (x*x) + (y*y);
double r4 = r2*r2;
double cDist = 1 + (k1*r2) + (k2*r4);
double xr = x*cDist;
double yr = y*cDist;
double a1 = 2*x*y;
double a2 = r2 + (2*(x*x));
double a3 = r2 + (2*(y*y));
double dx = (a1*p1) + (a2*p2);
double dy = (a3*p1) + (a1*p2);
double xd = xr + dx;
double yd = yr + dy;
double ud = (xd*fu) + u0;
double vd = (yd*fv) + v0;
thisPoint->x = ud; // the distorted point
thisPoint->y = vd;
Я слепо реализовал формулы отсюда, поэтому я не могу гарантировать, что это будет делать то, что вам нужно.
использование auto_zoom чтобы получить значение для zoom параметр.
def dist(x,y):
return sqrt(x*x+y*y)
def fisheye_to_rectilinear(src_size,dest_size,sx,sy,crop_factor,zoom):
""" returns a tuple of dest coordinates (dx,dy)
(note: values can be out of range)
crop_factor is ratio of sphere diameter to diagonal of the source image"""
# convert sx,sy to relative coordinates
rx, ry = sx-(src_size[0]/2), sy-(src_size[1]/2)
r = dist(rx,ry)
# focal distance = radius of the sphere
pi = 3.1415926535
f = dist(src_size[0],src_size[1])*factor/pi
# calc theta 1) linear mapping (older Nikon)
theta = r / f
# calc theta 2) nonlinear mapping
# theta = asin ( r / ( 2 * f ) ) * 2
# calc new radius
nr = tan(theta) * zoom
# back to absolute coordinates
dx, dy = (dest_size[0]/2)+rx/r*nr, (dest_size[1]/2)+ry/r*nr
# done
return (int(round(dx)),int(round(dy)))
def fisheye_auto_zoom(src_size,dest_size,crop_factor):
""" calculate zoom such that left edge of source image matches left edge of dest image """
# Try to see what happens with zoom=1
dx, dy = fisheye_to_rectilinear(src_size, dest_size, 0, src_size[1]/2, crop_factor, 1)
# Calculate zoom so the result is what we wanted
obtained_r = dest_size[0]/2 - dx
required_r = dest_size[0]/2
zoom = required_r / obtained_r
return zoom
Это можно решить как задачу оптимизации. Просто рисуйте кривые на изображениях, которые должны быть прямыми линиями. Сохраните точки контура для каждой из этих кривых. Теперь мы можем решить матрицу «рыбий глаз» как задачу минимизации. Минимизируйте кривую в точках, и это даст нам матрицу «рыбий глаз». Оно работает.
Это можно сделать вручную, настроив матрицу «рыбий глаз» с помощью трекбаров! Вот код графического интерфейса «рыбий глаз» , использующий OpenCV для ручной калибровки.