Получение карты глубины
Я не могу получить нормальную карту глубины из-за несоответствия. Вот мой код:
#include "opencv2/core/core.hpp"
#include "opencv2/calib3d/calib3d.hpp"
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include "opencv2/contrib/contrib.hpp"
#include <cstdio>
#include <iostream>
#include <fstream>
using namespace cv;
using namespace std;
ofstream out("points.txt");
int main()
{
Mat img1, img2;
img1 = imread("images/im7rect.bmp");
img2 = imread("images/im8rect.bmp");
//resize(img1, img1, Size(320, 280));
//resize(img2, img2, Size(320, 280));
Mat g1,g2, disp, disp8;
cvtColor(img1, g1, CV_BGR2GRAY);
cvtColor(img2, g2, CV_BGR2GRAY);
int sadSize = 3;
StereoSGBM sbm;
sbm.SADWindowSize = sadSize;
sbm.numberOfDisparities = 144;//144; 128
sbm.preFilterCap = 10; //63
sbm.minDisparity = 0; //-39; 0
sbm.uniquenessRatio = 10;
sbm.speckleWindowSize = 100;
sbm.speckleRange = 32;
sbm.disp12MaxDiff = 1;
sbm.fullDP = true;
sbm.P1 = sadSize*sadSize*4;
sbm.P2 = sadSize*sadSize*32;
sbm(g1, g2, disp);
normalize(disp, disp8, 0, 255, CV_MINMAX, CV_8U);
Mat dispSGBMscale;
disp.convertTo(dispSGBMscale,CV_32F, 1./16);
imshow("image", img1);
imshow("disparity", disp8);
Mat Q;
FileStorage fs("Q.txt", FileStorage::READ);
fs["Q"] >> Q;
fs.release();
Mat points, points1;
//reprojectImageTo3D(disp, points, Q, true);
reprojectImageTo3D(disp, points, Q, false, CV_32F);
imshow("points", points);
ofstream point_cloud_file;
point_cloud_file.open ("point_cloud.xyz");
for(int i = 0; i < points.rows; i++) {
for(int j = 0; j < points.cols; j++) {
Vec3f point = points.at<Vec3f>(i,j);
if(point[2] < 10) {
point_cloud_file << point[0] << " " << point[1] << " " << point[2]
<< " " << static_cast<unsigned>(img1.at<uchar>(i,j)) << " " << static_cast<unsigned>(img1.at<uchar>(i,j)) << " " << static_cast<unsigned>(img1.at<uchar>(i,j)) << endl;
}
}
}
point_cloud_file.close();
waitKey(0);
return 0;
}
Мои изображения:


Карта диспаратности:
Я получаю что-то вроде этого облака точек: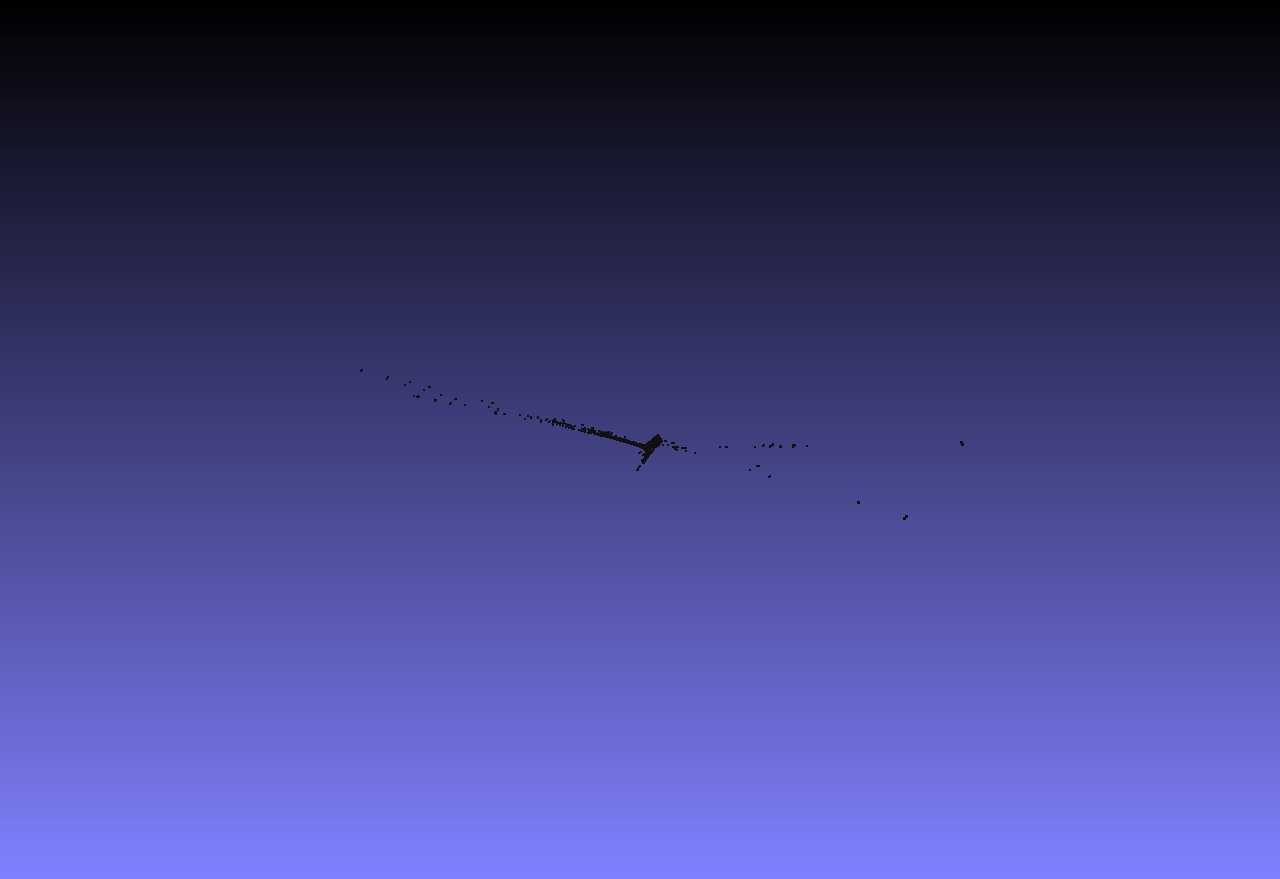
Q равно: [ 1., 0., 0., -3.2883545303344727e+02, 0., 1., 0., -2.3697290992736816e+02, 0., 0., 0., 5.4497170185417110e+02, 0., 0., -1.4446083962336606e-02, 0. ]
Я перепробовал много других вещей. Я пробовал с разными изображениями, но никто не смог получить нормальную карту глубины.
Что я делаю неправильно? Должен ли я сделать с reprojectImageTo3D или использовать другой подход вместо него? Каков наилучший способ визуализации карты глубины? (Я попробовал библиотеку point_cloud) Или вы можете предоставить мне рабочий пример с набором данных и информацией о калибровке, чтобы я мог запустить его и получить карту глубины. Или как я могу получить карту глубины из стерео базы данных Мидлбери ( http://vision.middlebury.edu/stereo/data/), я думаю, что не хватает информации о калибровке.
Отредактировано: Теперь я получаю что-то вроде: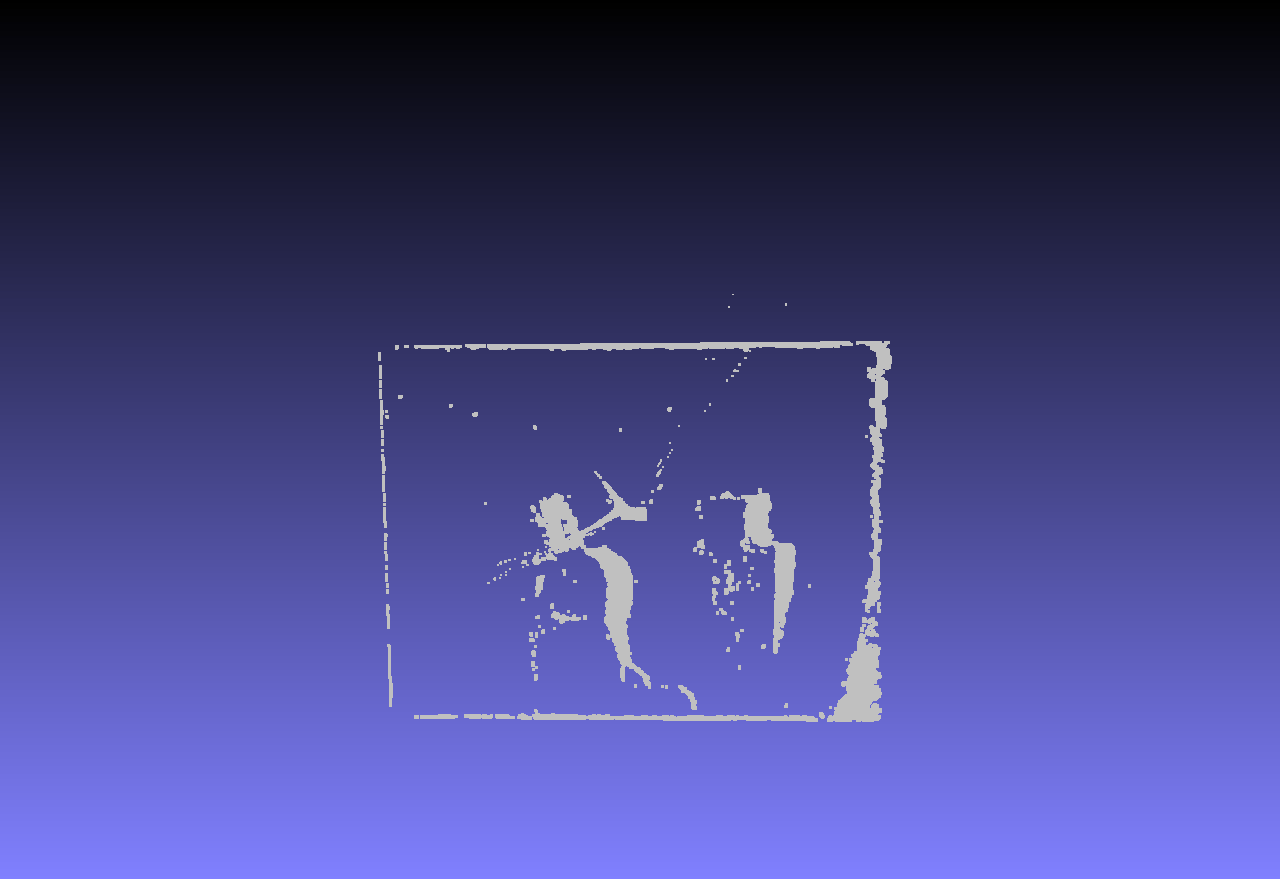
Это конечно лучше, но все же не нормально.
Edited2: я попробовал, что вы говорите:
Mat disp;
disp = imread("disparity-image.pgm", CV_LOAD_IMAGE_GRAYSCALE);
Mat disp64;
disp.convertTo(disp64,CV_64F, 1.0/16.0);
imshow("disp", disp);
Я получаю этот результат с помощью строки cv::minMaxIdx(...):
И это, когда я комментирую эту строку:
PS: Также, пожалуйста, не могли бы вы сказать мне, как я могу рассчитать глубину, зная только базовую линию и фокусное расстояние в пикселях.
1 ответ
Я сделал простое сравнение между OpenCV reprojectImageTo3D() и мой собственный (см. ниже), а также запустить тест на правильное несоответствие и Q матрица.
// Reproject image to 3D
void customReproject(const cv::Mat& disparity, const cv::Mat& Q, cv::Mat& out3D)
{
CV_Assert(disparity.type() == CV_32F && !disparity.empty());
CV_Assert(Q.type() == CV_32F && Q.cols == 4 && Q.rows == 4);
// 3-channel matrix for containing the reprojected 3D world coordinates
out3D = cv::Mat::zeros(disparity.size(), CV_32FC3);
// Getting the interesting parameters from Q, everything else is zero or one
float Q03 = Q.at<float>(0, 3);
float Q13 = Q.at<float>(1, 3);
float Q23 = Q.at<float>(2, 3);
float Q32 = Q.at<float>(3, 2);
float Q33 = Q.at<float>(3, 3);
// Transforming a single-channel disparity map to a 3-channel image representing a 3D surface
for (int i = 0; i < disparity.rows; i++)
{
const float* disp_ptr = disparity.ptr<float>(i);
cv::Vec3f* out3D_ptr = out3D.ptr<cv::Vec3f>(i);
for (int j = 0; j < disparity.cols; j++)
{
const float pw = 1.0f / (disp_ptr[j] * Q32 + Q33);
cv::Vec3f& point = out3D_ptr[j];
point[0] = (static_cast<float>(j)+Q03) * pw;
point[1] = (static_cast<float>(i)+Q13) * pw;
point[2] = Q23 * pw;
}
}
}
Практически одинаковые результаты были получены обоими методами, и все они кажутся мне правильными. Не могли бы вы попробовать это на вашей карте несоответствия и Q матрица? Вы можете иметь мою тестовую среду на моем GitHub.
Примечание 1: также позаботьтесь о том, чтобы не масштабировать двойное несоответствие (закомментируйте строку disparity.convertTo(disparity, CV_32F, 1.0 / 16.0); если твой disparity был также масштабирован.)
Примечание 2: он был построен с OpenCV 3.0, возможно, вам придется изменить включения.