Симулинк рассчитывал на перенапряжение модели при использовании призматического соединения в параллельных кинематических петлях
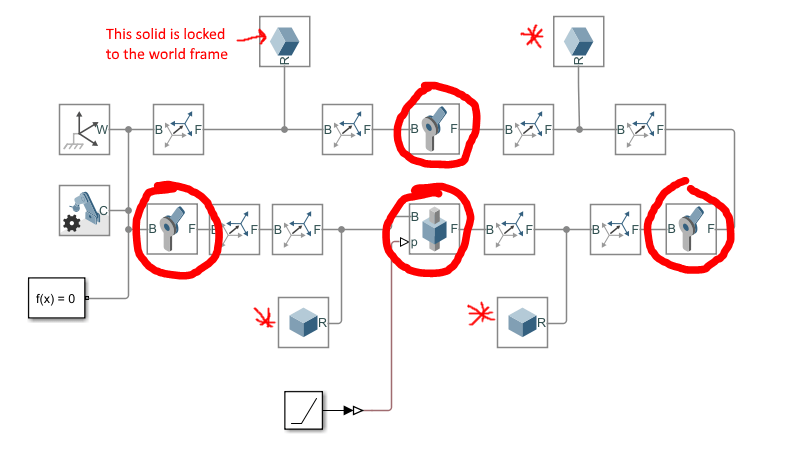
При использовании нескольких тел в Matlab Simulink (Simscape) можно ограничить 3 трехмерных тела с 3 вращающимися соединениями и одним призматическим соединением. (См. Изображение ниже). Как призматические, так и вращающиеся соединения удаляют 5DOF каждое, что должно привести к чрезмерно ограниченной модели с -2DOF, но симуляция просто радостно продвигается вперед. Установка в изображении произвела анимацию ниже.
Итак, мой вопрос: как это понимает Matlab? Разве призматическое соединение на самом деле не ограничивает вращение, или у Matlab есть какая-то функция для автоматического устранения таких механических перенапряжений?
Если кому-то из вас это интересно, у меня есть примеры файлов на GitHub:
https://github.com/Ndnes/SEexample.git