Нерегулярное облако точек от вокселей
Моя цель - разделить мое облако точек (полученное из TLS) на вокселы, где пользователь должен определить длину стороны вокселей. После создания вокселей мне нужно выбрать только одну точку, лежащую в вокселе, которая удовлетворяет определенному условию. Пока что я запрограммировал эту задачу, но у меня небольшая проблема. В некоторых частях облака точек плотность точек становится выше, как показано на следующем рисунке (более плотная область отмечена красным многоугольником):
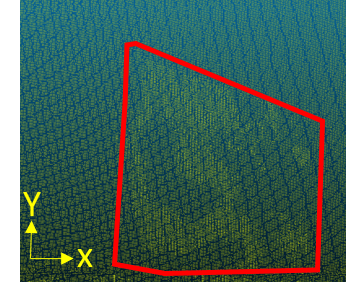
Я думаю, что это результат смежных вокселей в направлении Z, которое перпендикулярно плоскости XY. Не могли бы вы помочь мне об этой проблеме?
Вот мой код:
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
//pcd'ye dönüştürülen dosyanın okunması
pcl::io::loadPCDFile<pcl::PointXYZ>("input/yeni_proje_V2_ENTIRE_CLOUD_with_SEMI_DIAGONAL - Cloud.pcd", *cloud);
//voxel boyutu (metre)
float resolution = 0.02f;
//voxel index merkez ve içindeki noktalar
FILE *Dosya = fopen("output/yeni_proje_V2_ENTIRE_VOXELS_INDEXES_2cm_SEMI_DIAGONAL_ROTATED.xyz", "w+");
//hata elipsoidlerini içeren dosya
FILE* Dosya2 = fopen("input/yeni_proje_V2_ENTIRE_CLOUD_with_SEMI_DIAGONAL - ROTATED.xyz", "r");
//elipsoidi en küçük olan noktalar
FILE *Dosya3 = fopen("output/yeni_proje_V2_2cm_selected_ONLY_COORDS_SEMI_DIAGONAL_ROTATED.xyz", "w+");
FILE *Dosya4 = fopen("output/yeni_proje_V2_2cm_selected_SEMI_DIAGONAL_ROTATED.xyz", "w+");
//FILE *Dosya5 = fopen("input/FARO_salon010203_COORDINATES_NORMALS.xyz", "r");
//FILE *Dosya6 = fopen("output/FARO_salon010203_5cm_selected_COORDINATES_and_NORMALS_SEMI_DIAGONAL.xyz", "w+");
pcl::octree::OctreePointCloudSearch<pcl::PointXYZ> octree(resolution);
int index;
double a, b, c, deer;
double* r_deer = new double[cloud->points.size()];// hata parametri çekme
double* normal_x = new double[cloud->points.size()];
double* normal_y = new double[cloud->points.size()];
double* normal_z = new double[cloud->points.size()];
for (index = 0; index < cloud->points.size(); index++)// hata parametri çekme
{
fscanf(Dosya2, "%lf %lf %lf %lf", &a, &b, &c, &deer);//4 lü dosya
r_deer[index] = deer;
//fscanf(Dosya5, "%lf %lf %lf %lf %lf %lf", &a, &b, &c, &normal_x[index], &normal_y[index],&normal_z[index]);
}
std::cout << normal_x[4] <<" "<<normal_y[4]<<" "<< normal_z[4] << std::endl;
octree.setInputCloud(cloud);
octree.addPointsFromInputCloud();
pcl::PointXYZ searchPoint;
std::cout << "Voxel sayisi: " << octree.getLeafCount() << std::endl;
// Neighbors within voxel search
std::vector<pcl::PointXYZ, Eigen::aligned_allocator<pcl::PointXYZ>> pointGrid;
octree.getOccupiedVoxelCenters(pointGrid);
int k = 0;
int kıyas = 0;
/*
int kontrol;
std::cout << "kontrol satiri girin:" << std::endl;
std::cin >> kontrol;//kontrol
kontrol = kontrol - 1;
*/
for (k = 0; k < octree.getLeafCount(); k++)
{
// if (k == kontrol) std::cout << "Secili merkez" << "(" << pointGrid[k].x << " " << pointGrid[k].y << " " << pointGrid[k].z << ")" << std::endl;//kontrol
fprintf(Dosya, "%i %f %f %f", k + 1, pointGrid[k].x, pointGrid[k].y, pointGrid[k].z);
std::vector<int> pointIdxVec;
double limit = sqrt(3)*resolution;
limit = limit / 2;
if (octree.voxelSearch(pointGrid[k], pointIdxVec))
{
kıyas = pointIdxVec[0];
for (size_t i = 0; i < pointIdxVec.size(); ++i)
{
if (pointIdxVec.size() - (i + 1) != 0)//Hata elipsoidlerini kıyasla ve en küçüğü ver
{
if (r_deer[kıyas] > r_deer[pointIdxVec[i + 1]])kıyas = pointIdxVec[i + 1];
}
//if (kontrol == k) std::cout << pointIdxVec[i] + 1 << "(" << r_deer[pointIdxVec[i]] << ")" << std::endl; //kontrol
fprintf(Dosya, " %i", pointIdxVec[i] + 1);
if (pcl::euclideanDistance(cloud->points[pointIdxVec[i]], pointGrid[k]) >= limit)
{
std::cout << pointIdxVec[i] << " " << cloud->points[pointIdxVec[i]] << " Nokta voxelin icinde degil!!! " << std::endl;
std::cout << pcl::euclideanDistance(cloud->points[pointIdxVec[i]], pointGrid[k]) << " Merkezle Mesefe" << std::endl;
std::cout << limit << " Olması gereken maksimum mesafe" << std::endl;
}
}
//if (kontrol == k) std::cout << "Minimum:" << kıyas + 1 << "(" << r_deer[kıyas] << ")" << std::endl; //kontrol
fprintf(Dosya3, "%f %f %f\n", cloud->points[kıyas].x, cloud->points[kıyas].y, cloud->points[kıyas].z);
//fprintf(Dosya6, "%f %f %f %f %f %f\n", cloud->points[kıyas].x, cloud->points[kıyas].y, cloud->points[kıyas].z, normal_x[kıyas], normal_y[kıyas], normal_z[kıyas]);
fprintf(Dosya4, "%f %f %f %f\n", cloud->points[kıyas].x, cloud->points[kıyas].y, cloud->points[kıyas].z,r_deer[kıyas]);
fprintf(Dosya, "\n");
}
}
fclose(Dosya);
fclose(Dosya2);
fclose(Dosya3);
fclose(Dosya4);
//fclose(Dosya5);
//fclose(Dosya6);
}
Я с нетерпением жду ответа от вас
Мустафа
1 ответ
Может быть, вы пытаетесь "оканчивать" ваши данные, и вы хотите сохранить в каждом вокселе собственную структуру данных, соответствующую вашим требованиям. Вот общая структура 3D Mapping Framework, которая позволяет вам хранить в Voxel ваши пользовательские данные:
https://github.com/m4nh/skimap_ros
Вам нужно создать пользовательские данные для Voxel, которые могут хранить набор точек, реализующих пользовательский метод:
voxel.getSatisfactoryPoint(..)
это скрывает вашу бизнес-логику и возвращает только одно очко за каждый воксель.