Как я могу использовать отношения между совпадениями Фланна, чтобы определить разумную гомографию?
У меня есть панорамное изображение и уменьшенное изображение зданий, видимых на этом панорамном изображении. Что я хочу сделать, так это распознать, находятся ли здания на этом меньшем изображении на этом панорамном изображении, и как выстроились 2 изображения.
В этом первом примере я использую обрезанную версию моего панорамного изображения, поэтому пиксели идентичны.
import cv2
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
import math
# Load images
cwImage = cv2.imread('cw1.jpg',0)
panImage = cv2.imread('pan1.jpg',0)
# Prepare for SURF image analysis
surf = cv2.xfeatures2d.SURF_create(4000)
# Find keypoints and point descriptors for both images
cwKeypoints, cwDescriptors = surf.detectAndCompute(cwImage, None)
panKeypoints, panDescriptors = surf.detectAndCompute(panImage, None)
Затем я использую OpenCV FlannBasedMatcher, чтобы найти хорошие совпадения между двумя изображениями:
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50)
flann = cv2.FlannBasedMatcher(index_params, search_params)
# Find matches between the descriptors
matches = flann.knnMatch(cwDescriptors, panDescriptors, k=2)
good = []
for m, n in matches:
if m.distance < 0.7 * n.distance:
good.append(m)
Таким образом, вы можете видеть, что в этом примере он идеально соответствует точкам между изображениями. Итак, я нахожу гомографию и применяю перспективный перекос:
cwPoints = np.float32([cwKeypoints[m.queryIdx].pt for m in good
]).reshape(-1, 1, 2)
panPoints = np.float32([panKeypoints[m.trainIdx].pt for m in good
]).reshape(-1, 1, 2)
h, status = cv2.findHomography(cwPoints, panPoints)
warpImage = cv2.warpPerspective(cwImage, h, (panImage.shape[1], panImage.shape[0]))
Результатом является то, что он идеально помещает меньшее изображение в большее изображение.
Теперь я хочу сделать это, когда уменьшенное изображение не является идеальной версией более крупного изображения.
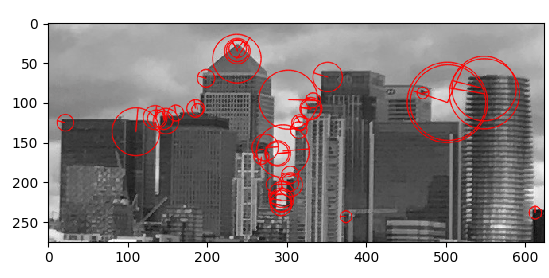
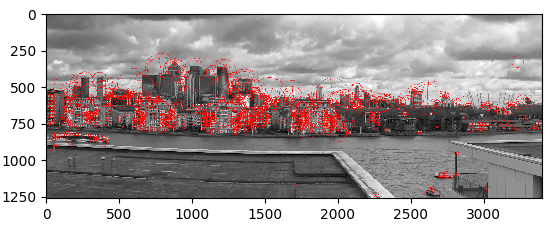
Для нового меньшего изображения ключевые точки выглядят так:
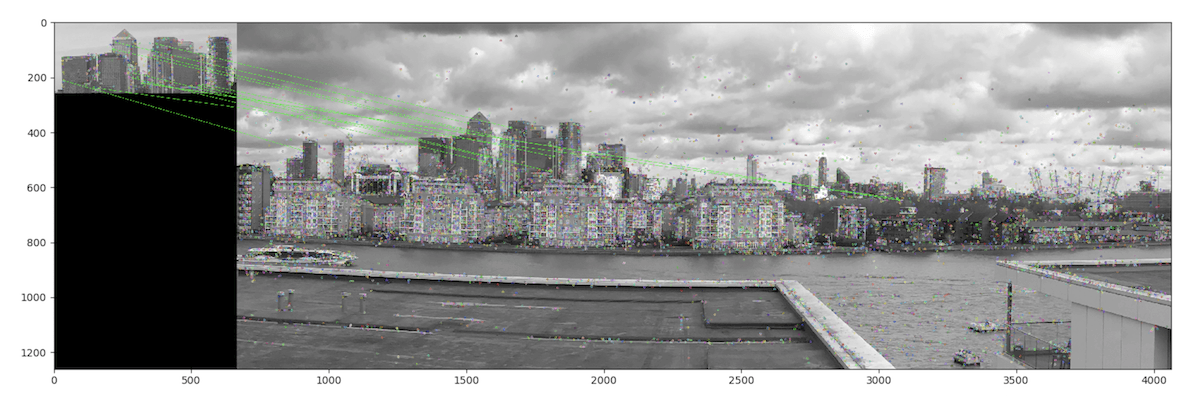
Вы можете видеть, что в некоторых случаях он соответствует правильно, а в некоторых - нет.
Если я позвоню findHomography с этими совпадениями он будет принимать во внимание все эти точки данных и придумывать бессмысленную перспективу деформации, поскольку основывает ее на правильных совпадениях и неправильных совпадениях.
То, что я ищу, - это пропущенный шаг между обнаружением хороших совпадений и вызовом findHomographyгде я могу посмотреть на отношения между совпадениями и определить, какие совпадения, следовательно, являются правильными.
Мне интересно, есть ли в OpenCV функция, на которую я должен обратить внимание на этом шаге, или это то, что мне нужно будет решить самостоятельно, и если да, то как мне это сделать?
1 ответ
Я написал блог о поиске объекта на сцене в прошлом году ( 2017.11.11). Может быть, это поможет. Вот ссылка. https://zhuanlan.zhihu.com/p/30936804
Конверт: OpenCV 3.3 + Python 3.5
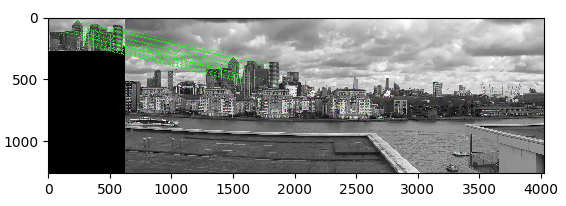
Найдено совпадений:
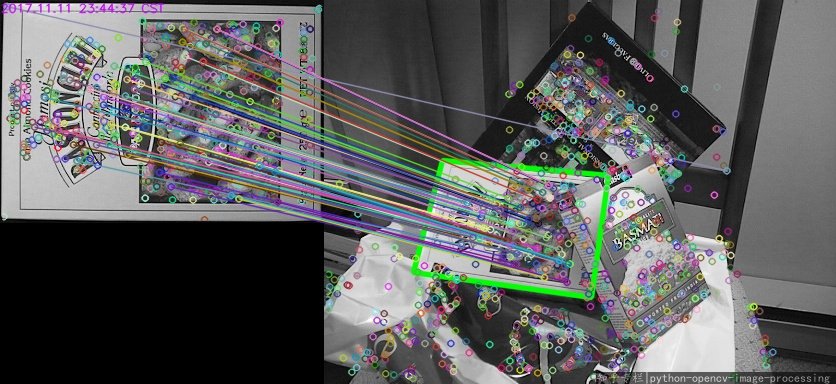
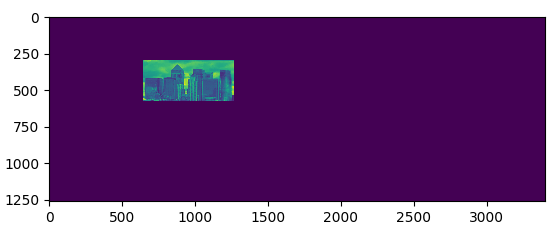
Найденный объект в сцене:

Код:
#!/usr/bin/python3
# 2017.11.11 01:44:37 CST
# 2017.11.12 00:09:14 CST
"""
使用Sift特征点检测和匹配查找场景中特定物体。
"""
import cv2
import numpy as np
MIN_MATCH_COUNT = 4
imgname1 = "box.png"
imgname2 = "box_in_scene.png"
## (1) prepare data
img1 = cv2.imread(imgname1)
img2 = cv2.imread(imgname2)
gray1 = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
gray2 = cv2.cvtColor(img2, cv2.COLOR_BGR2GRAY)
## (2) Create SIFT object
sift = cv2.xfeatures2d.SIFT_create()
## (3) Create flann matcher
matcher = cv2.FlannBasedMatcher(dict(algorithm = 1, trees = 5), {})
## (4) Detect keypoints and compute keypointer descriptors
kpts1, descs1 = sift.detectAndCompute(gray1,None)
kpts2, descs2 = sift.detectAndCompute(gray2,None)
## (5) knnMatch to get Top2
matches = matcher.knnMatch(descs1, descs2, 2)
# Sort by their distance.
matches = sorted(matches, key = lambda x:x[0].distance)
## (6) Ratio test, to get good matches.
good = [m1 for (m1, m2) in matches if m1.distance < 0.7 * m2.distance]
canvas = img2.copy()
## (7) find homography matrix
## 当有足够的健壮匹配点对(至少4个)时
if len(good)>MIN_MATCH_COUNT:
## 从匹配中提取出对应点对
## (queryIndex for the small object, trainIndex for the scene )
src_pts = np.float32([ kpts1[m.queryIdx].pt for m in good ]).reshape(-1,1,2)
dst_pts = np.float32([ kpts2[m.trainIdx].pt for m in good ]).reshape(-1,1,2)
## find homography matrix in cv2.RANSAC using good match points
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC,5.0)
## 掩模,用作绘制计算单应性矩阵时用到的点对
#matchesMask2 = mask.ravel().tolist()
## 计算图1的畸变,也就是在图2中的对应的位置。
h,w = img1.shape[:2]
pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2)
dst = cv2.perspectiveTransform(pts,M)
## 绘制边框
cv2.polylines(canvas,[np.int32(dst)],True,(0,255,0),3, cv2.LINE_AA)
else:
print( "Not enough matches are found - {}/{}".format(len(good),MIN_MATCH_COUNT))
## (8) drawMatches
matched = cv2.drawMatches(img1,kpts1,canvas,kpts2,good,None)#,**draw_params)
## (9) Crop the matched region from scene
h,w = img1.shape[:2]
pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2)
dst = cv2.perspectiveTransform(pts,M)
perspectiveM = cv2.getPerspectiveTransform(np.float32(dst),pts)
found = cv2.warpPerspective(img2,perspectiveM,(w,h))
## (10) save and display
cv2.imwrite("matched.png", matched)
cv2.imwrite("found.png", found)
cv2.imshow("matched", matched);
cv2.imshow("found", found);
cv2.waitKey();cv2.destroyAllWindows()