Реализация меры качества отпечатков пальцев?
Я пытаюсь реализовать анализ качества отпечатков пальцев в пространственной области. Показатель качества показан ниже:
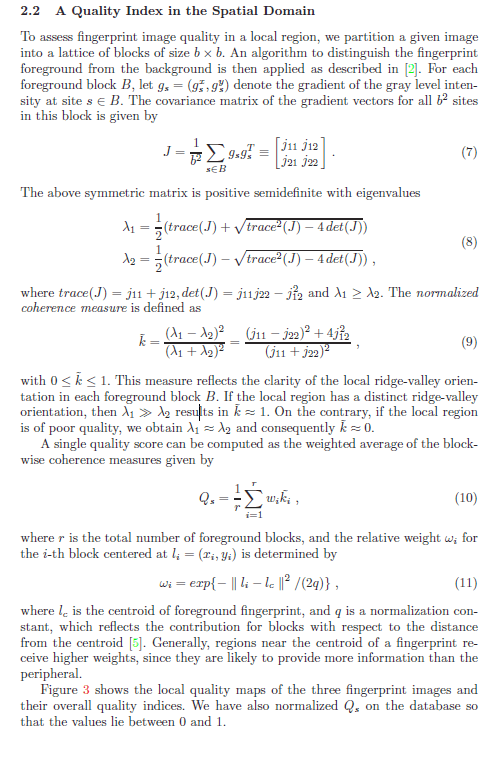
Я смог реализовать до уравнения 9. Следующий шаг - вычислить вес, как показано в уравнении 11. Но когда я попытался реализовать все веса равны нулю. Было бы очень полезно, если бы кто-то мог помочь мне решить эту проблему. Я приложил код ниже:
clc;clear all;close all;
img = imread('C:\Users\shrey\Google Drive\quality\TestDatabase\FVC2004\DB1_B\101_2.tif');
B = 2;
br=1;
img=finger_segment(img);
img(img==0.5)=0;
[gx,gy]=gradient(img);
for i = 1 :B: size(img,1)
for j = 1 :B: size(img,2)
% gradients blockwise
gx1 = gx(i:min(i+B-1,size(gx,1)),j:min(j+B-1,size(gx,2)));
gy1 = gy(i:min(i+B-1,size(gy,1)),j:min(j+B-1,size(gy,2)));
temp = img(i:min(i+B-1,size(img,1)),j:min(j+B-1,size(img,2)));
if (any(any(temp)) == 1)
k(br) = coherence_grad_3(gx1,gy1,B);
temp2=temp/sum(temp(:));
% Centroid Calculation
[r1,c1]=size(temp);
[I,J]=ndgrid(1:r1,1:c1);
li(br,:)=[dot(I(:),temp2(:)),dot(J(:),temp2(:))];
li1(br,1)=li(br,1)+ (i-1);
li1(br,2)=li(br,2)+ (j-1);
br = br + 1;
end
end
end
%% Finding centroid of whole image
k(isnan(k))=0;
mask = zeros(size(img));
mask(img>0)=1; % mask to find the centroid of foreground
imgcent=mask/sum(mask(:));
[r1,c1]=size(mask);
[I,J]=ndgrid(1:r1,1:c1);
lc=[dot(I(:),imgcent(:)),dot(J(:),imgcent(:))];
%% Relative weight
sub=bsxfun(@minus, lc, li);
for c=1:br-1
num(c) =(norm(sub(c,:)));
end
for c=1:br-1
wi(c) = exp(-(num(c).^2)/2*5);
end
Q = (1/br) * sum(wi.*k);
Functions for the above code
% COHERENCE MATRIX EQUATION 7 CODE:
function k1= coherence_grad_3(gx,gy,B)
%UNTITLED3 Summary of this function goes here
% Detailed explanation goes here
J=0;
for i = 1:size(gx,1)
for j = 1:size(gx,2)
Gs=[gx(i,j),gy(i,j)]';
J= Gs* Gs' + J;
end
end
J= (J/(B.^2));
l = eig(J);
k1 = ((l(1)-l(2)).^2)/((l(1)+l(2)).^2);
end
% SEGMENTATION PROGRAM
function F3=finger_segment(H)
if(ndims(H)==3)
H= rgb2gray(H);
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Function to segment fingerprint image using morphological processing.
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
H=im2double(H);
%%% Step 1: Feature Extraction
H1=rangefilt(H);
%%% Convert to binary image
H2=adaptivethreshold(H1,16,0.05,0);
%%% Step 2: Morphological Processing
SE = strel('disk', 6, 4);
H3=imclose(~H2,SE);
H4=imopen(H3,SE);
H4 = imfill(H4,'holes');
SE1=strel('square',12);
H4=imerode(H4,SE1);
[m1,n1] = size(H);
F=zeros(m1,n1);
[L, num] = bwlabel(H4,8);
max1=0;
for j=1:num
[r, c] = find(bwlabel(L)==j);
m=size(r,1);
if (max1<m)
id=j;
max1=m;
end
end
[r, c] = find(bwlabel(L)==id);
s3=size(r,1);
for i=1:s3
F(r(i),c(i))=1;
end
%%% Step 3: Contour Smoothing
erf=boundaries(F);
erf=erf{1};
z=frdescp(erf);
z1=ifrdescp(z,50);
x = round(z1(:, 1));
y = round(z1(:, 2));
if(min(x)<=0)
x = x - min(x) + 1;
end
if (min(y)<=0)
y = y - min(y) + 1;
end
ZZ=zeros(m1,n1);
for ii=1:size(z1,1)
ZZ(x(ii),y(ii))=1;
end
SE1=strel('square',3);
ZZ=imdilate(ZZ,SE1);
[r1, c1] = find(ZZ==1);
ZZ=imfill(ZZ,'holes');
for i=1:m1
for j=1:n1
if(ZZ(i,j)==1)
F3(i,j)=H(i,j);
else
F3(i,j)=0.5;
end
end
end
function bw=adaptivethreshold(IM,ws,C,tm)
if (nargin<3)
error('You must provide the image IM, the window size ws, and C.');
elseif (nargin==3)
tm=0;
elseif (tm~=0 && tm~=1)
error('tm must be 0 or 1.');
end
IM=mat2gray(IM);
if tm==0
mIM=imfilter(IM,fspecial('average',ws),'replicate');
else
mIM=medfilt2(IM,[ws ws]);
end
sIM=mIM-IM-C;
bw=im2bw(sIM,0);
bw=imcomplement(bw);
function B = boundaries(BW, conn, dir)
if nargin < 3
dir = 'cw';
end
if nargin < 2
conn = 8;
end
L = bwlabel(BW, conn);
numObjects = max(L(:));
if numObjects > 0
B = {zeros(0, 2)};
B = repmat(B, numObjects, 1);
else
B = {};
end
Lp = padarray(L, [1 1], 0, 'both');
M = size(Lp, 1);
if conn == 8
offsets = [-1, M - 1, M, M + 1, 1, -M + 1, -M, -M-1];
else
offsets = [-1, M, 1, -M];
end
if conn == 8
next_search_direction_lut = [8 8 2 2 4 4 6 6];
else
next_search_direction_lut = [4 1 2 3];
end
if conn == 8
next_direction_lut = [2 3 4 5 6 7 8 1];
else
next_direction_lut = [2 3 4 1];
end
START = -1;
BOUNDARY = -2;
scratch = zeros(100, 1);
[rr, cc] = find((Lp(2:end-1, :) > 0) & (Lp(1:end-2, :) == 0));
rr = rr + 1;
for k = 1:length(rr)
r = rr(k);
c = cc(k);
if (Lp(r,c) > 0) & (Lp(r - 1, c) == 0) & isempty(B{Lp(r, c)})
idx = (c-1)*size(Lp, 1) + r;
which = Lp(idx);
scratch(1) = idx;
Lp(idx) = START;
numPixels = 1;
currentPixel = idx;
initial_departure_direction = [];
done = 0;
next_search_direction = 2;
while ~done
direction = next_search_direction;
found_next_pixel = 0;
for k = 1:length(offsets)
neighbor = currentPixel + offsets(direction);
if Lp(neighbor) ~= 0
if (Lp(currentPixel) == START) & ...
isempty(initial_departure_direction)
initial_departure_direction = direction;
elseif (Lp(currentPixel) == START) & ...
(initial_departure_direction == direction)
done = 1;
found_next_pixel = 1;
break;
end
next_search_direction = ...
next_search_direction_lut(direction);
found_next_pixel = 1;
numPixels = numPixels + 1;
if numPixels > size(scratch, 1)
scratch(2*size(scratch, 1)) = 0;
end
scratch(numPixels) = neighbor;
if Lp(neighbor) ~= START
Lp(neighbor) = BOUNDARY;
end
currentPixel = neighbor;
break;
end
direction = next_direction_lut(direction);
end
if ~found_next_pixel
numPixels = 2;
scratch(2) = scratch(1);
done = 1;
end
end
[row, col] = ind2sub(size(Lp), scratch(1:numPixels));
B{which} = [row - 1, col - 1];
end
end
if strcmp(dir, 'ccw')
for k = 1:length(B)
B{k} = B{k}(end:-1:1, :);
end
end
function z = frdescp(s)
[np, nc] = size(s);
if nc ~= 2
error('S must be of size np-by-2.');
end
if np/2 ~= round(np/2);
s(end + 1, :) = s(end, :);
np = np + 1;
end
x = 0:(np - 1);
m = ((-1) .^ x)';
s(:, 1) = m .* s(:, 1);
s(:, 2) = m .* s(:, 2);
s = s(:, 1) + i*s(:, 2);
z = fft(s);
function s = ifrdescp(z, nd)
np = length(z);
if nargin == 1 | nd > np
nd = np;
end
x = 0:(np - 1);
m = ((-1) .^ x)';
d = round((np - nd)/2);
z(1:d) = 0;
z(np - d + 1:np) = 0;
zz = ifft(z);
s(:, 1) = real(zz);
s(:, 2) = imag(zz);
s(:, 1) = m.*s(:, 1);
s(:, 2) = m.*s(:, 2);
Заранее спасибо.