Как найти матрицу вращения от вектора к другому?
У меня есть объект с 3 вектора. Скажем так:
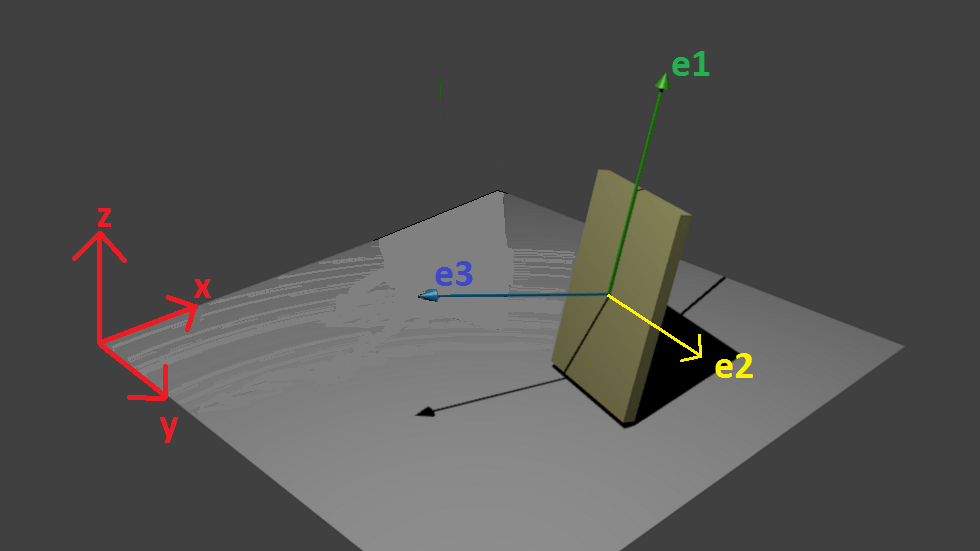
e1=[a1 b1 c1];
e2=[a2 b2 c2];
e3=[a3 b3 c3];
Глобальная система координат (Ox, Oy, Oz)
n1=[1 0 0]; % Ox
n2=[0 1 0]; % Oy
n3=[0 0 1]; % Oz
Как найти матрицу вращения R, чтобы повернуть объект, чтобы он соответствовал xyz (e1 // n1, e2 // n2, e3 // n3)?
(//: параллельно)
Как найти R?