Настройка leadshine DM860 биполярный драйвер двигателя на Raspberry Pi
Итак, я хочу использовать свой биполярный драйвер Leadshine DM860 на Raspberry Pi 3, и я использую руководство из https://makezine.com/2014/03/19/driving-big-stepper-motors-with-arduino/ (я уже попробуйте на Arduino, и он работает, я использую код "Nema34_potensiometer.ino"), но он не работает. Итак, это пример моего кода:
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
#GPIO.setup(26,GPIO.OUT)
GPIO.setup(21,GPIO.OUT)
GPIO.setup(20,GPIO.OUT)
#GPIO.output(26,True)
GPIO.output(21,False)
#GPIO.output(21,GPIO.LOW)
microStep = 0
while True:
GPIO.output(20,True)
#time.sleep(1)
GPIO.output(20,False)
time.sleep(1)
microStep = microStep + 1
print(microStep)
GPIO.cleanup()
и проводка между драйвером и малиной выглядит так:
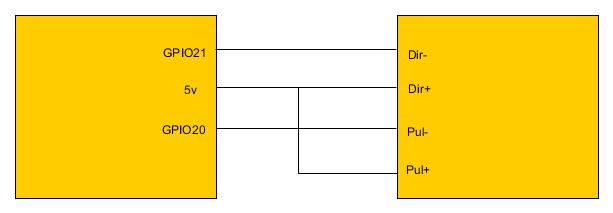
Итак, какую конфигурацию я должен сделать на Raspberry Pi? благодарю вас
0 ответов
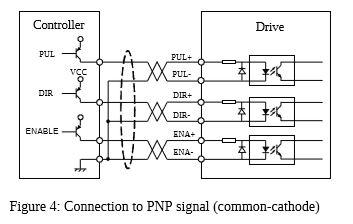
Я меняю интерфейс разъема управляющего сигнала (P1), выбираю соединение с сигналом PNP. Кажется, что между Arduino и Raspberry Pi по-разному, как они дают мощность и сигнал волны для каждого датчика / устройства, которые подключаются к их выводу GPIO или выводу ввода / вывода