Python - 3D аффинное преобразование
Я работаю с двумя похожими, но еще не идентичными объемами с сеткой объема внутри. Я хочу, чтобы мой первый том (зеленый) соответствовал второму (красному). Оба имеют ConvexHull ( http://scipy.github.io/devdocs/generated/scipy.spatial.ConvexHull.html) с внутренними вершинами. Я создал несколько маркеров (см. Рисунок 1) для обоих томов для расчета матрицы преобразования ( https://community.esri.com/thread/183601-numpy-linalglstsq-coordinate-translations).
Структура данных таблицы объема моего исходного тома:
array([[ 0.025, -0.055, -0.03 ],
[-0.01 , -0.05 , -0.03 ],
[-0.005, -0.05 , -0.03 ],
...,
[-0.01 , -0.03 , 0.1 ],
[-0.01 , -0.025, 0.1 ],
[-0.015, -0.02 , 0.1 ]])
, with the shape of `(12163, 3)`
Структура данных таблицы объема моего исходного тома:
array([[ 0. , -0.055, -0.065],
[ 0.005, -0.055, -0.065],
[-0.005, -0.05 , -0.065],
...,
[-0.005, -0.02 , 0.08 ],
[ 0. , -0.02 , 0.08 ],
[ 0.005, -0.02 , 0.08 ]])
, with the shape of `(14629, 3)`

Координаты исходных маркеров, которые должны быть преобразованы:
array([[-0.00307161, -0.01828496, 0.03521746],
[-0.065 , -0.01828496, 0.03521746],
[ 0.06 , -0.01828496, 0.03521746],
[-0.00307161, -0.01828496, 0.1 ],
[-0.00307161, 0.075 , 0.03521746],
[-0.00307161, -0.01828496, -0.03 ]])
Маркер шаблона:
array([[ 0.00038417, -0.02389603, 0.00802208],
[-0.07 , -0.02389603, 0.00802208],
[ 0.07 , -0.02389603, 0.00802208],
[ 0.00038417, -0.02389603, 0.08 ],
[ 0.00038417, 0.07 , 0.00802208],
[ 0.00038417, -0.02389603, -0.065 ]])
Я беру координаты своих маркеров, чтобы вычислить матрицу преобразования, например:
print 'Calculating the transformation matrix..\n'
n = orig_marker.shape[0]
pad = lambda x: np.hstack([x, np.ones((x.shape[0], 1))])
unpad = lambda x: x[:,:-1]
trans_mat, res, rank, s = np.linalg.lstsq(pad(orig_marker), pad(temp_marker))
transform = lambda x: unpad(np.dot(pad(x), trans_mat))
trans_mat[np.abs(trans_mat) < 1e-10] = 0 # set really small values to zero
print 'trans matrix is:\n', trans_mat
trans_mat_inv = np.linalg.inv(trans_mat)
Out [1]: trans matrix is [[ 3.29770822e-02 1.06840729e-02 1.71325156e-03 0.00000000e+00]
[ -7.56419706e-03 9.51696607e-03 3.51349962e-02 0.00000000e+00]
[ 5.32353680e-03 2.91946064e-01 8.44071139e-01 0.00000000e+00]
[ 1.96037928e-04 -3.51253282e-02 -3.05335725e-02 1.00000000e+00]]
После этого я применяю свою матрицу преобразования к точкам сетки объема:
# apply rotation and scale
transformed_points = np.dot(orig_points, trans_mat[:3, :3].T)
# apply translation
transformed_points += trans_mat[:3, 3]
x_t, y_t, z_t = transformed_points.T
, где orig_points а также temp_points объемные сетки моих объемов x_t, y_t, z_t координаты моих преобразованных сеток объема.
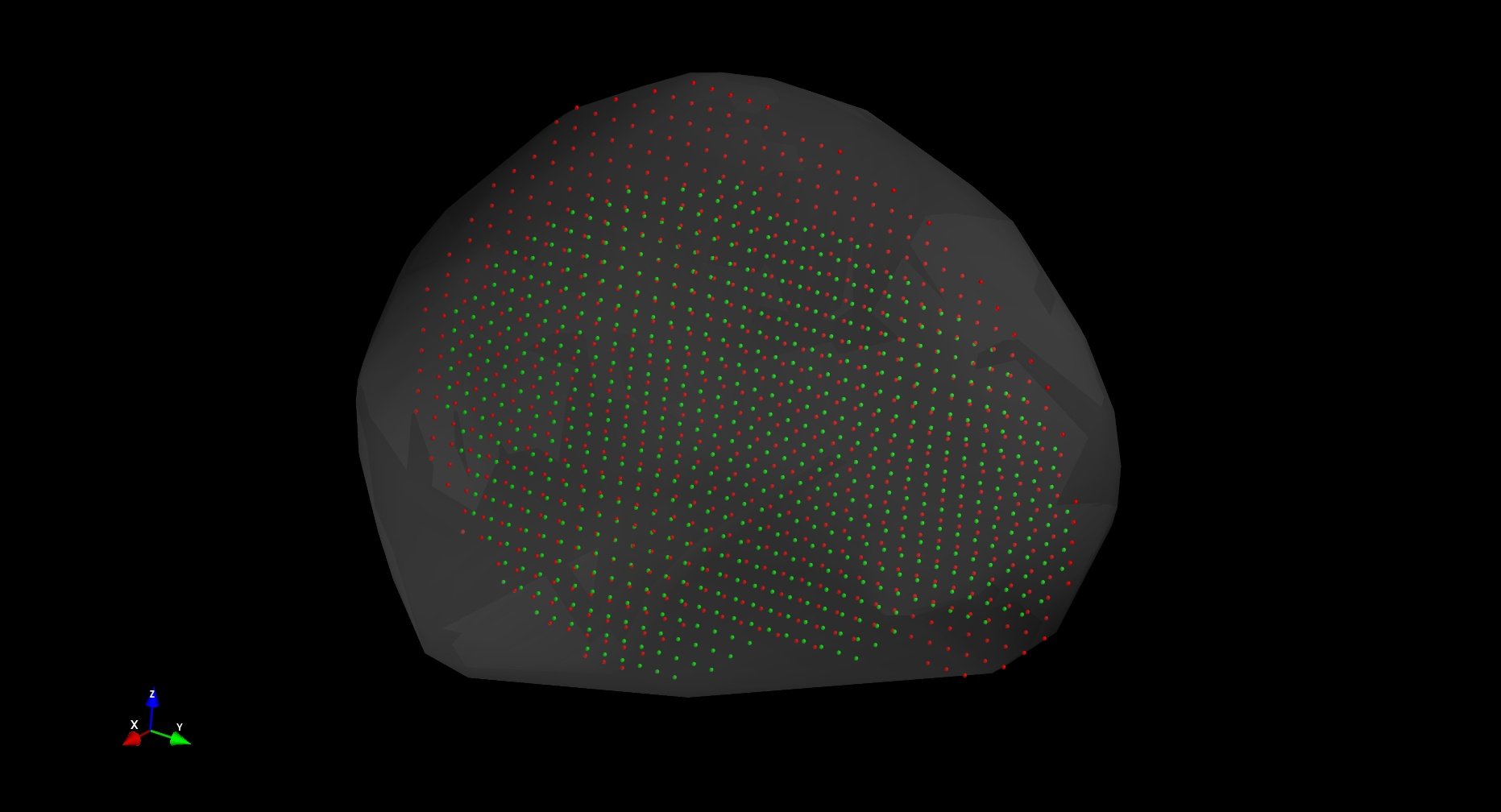
Так как я применяю вращение, масштабирование и трансляцию, мои сетки объема должны совпадать. к сожалению, моя сетка объема по-прежнему выглядит как на рисунке 2: 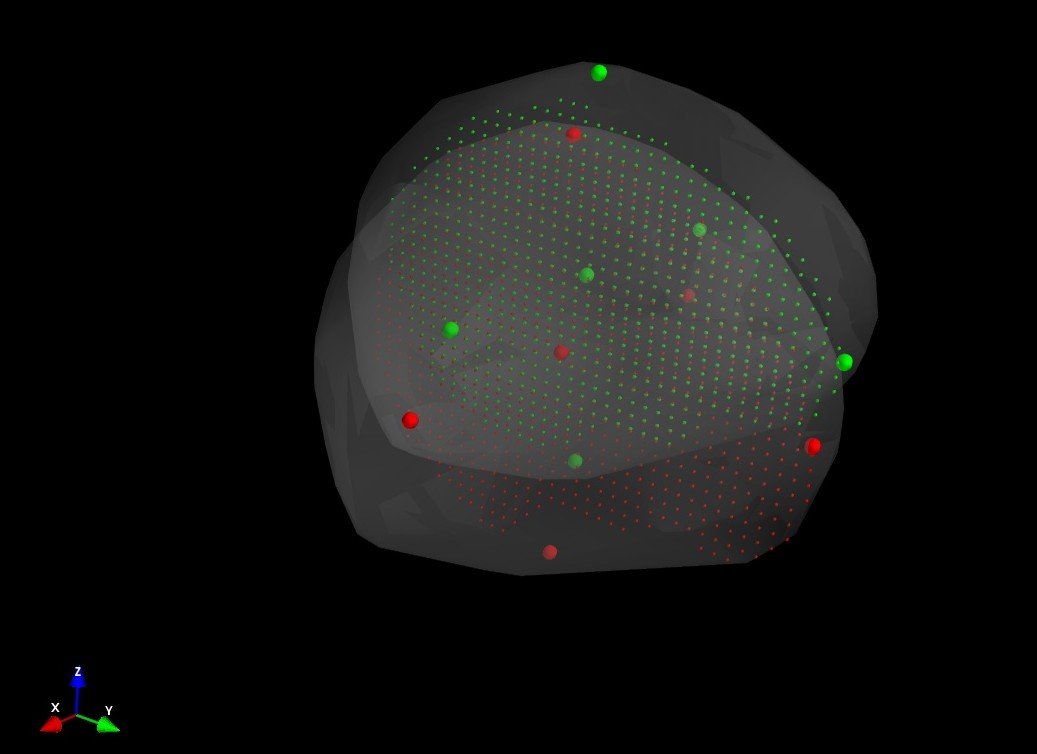
Я почти уверен, что мой подход правильный. Я думаю, что ошибка может быть в расчете матрицы преобразования.
Кто-нибудь может увидеть, что пошло не так или где я ошибся?
С моим собственным переводом результат выглядел следующим образом:
Поскольку результат не точный, я бы предпочел правильный расчет моей матрицы преобразования.