ST32F407 получил HAL_ETH_ERROR_DMA, когда я подключил кабель Ethernet
У меня есть STM32F407 с Ethernet PHY DP83848.
Я не могу пропинговать устройство, если я использую LwIP, потому что я сталкиваюсь с некоторыми ошибками.
Я делаю следующие шаги, чтобы воспроизвести ошибку.
- Я запускаю свою печатную плату
- Я позволяю инициализации делать свою работу, и я не получаю никаких ошибок.
- Я подключаю свой кабель Ethernet
- Я пингую случайное устройство со случайным номером
Затем мой светодиод активности мигает на DP83848, а затем я получаю прерывание.
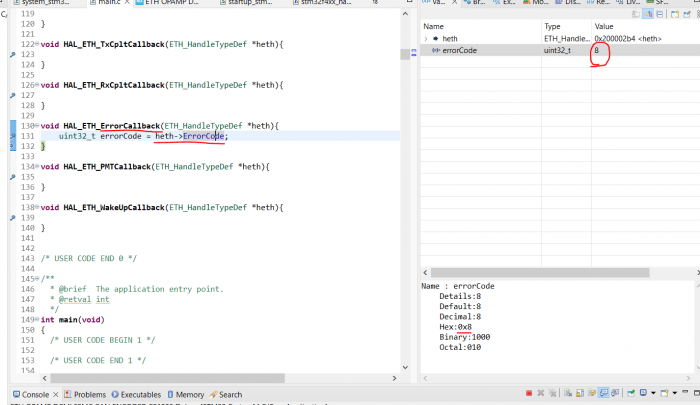
Я получаю код ошибки 0x8. Это означает, что у меня проблемы с DMA. Но почему?
/** @defgroup ETH_Error_Code ETH Error Code
* @{
*/
#define HAL_ETH_ERROR_NONE ((uint32_t)0x00000000U) /*!< No error */
#define HAL_ETH_ERROR_PARAM ((uint32_t)0x00000001U) /*!< Busy error */
#define HAL_ETH_ERROR_BUSY ((uint32_t)0x00000002U) /*!< Parameter error */
#define HAL_ETH_ERROR_TIMEOUT ((uint32_t)0x00000004U) /*!< Timeout error */
#define HAL_ETH_ERROR_DMA ((uint32_t)0x00000008U) /*!< DMA transfer error */
#define HAL_ETH_ERROR_MAC ((uint32_t)0x00000010U) /*!< MAC transfer error */
#if (USE_HAL_ETH_REGISTER_CALLBACKS == 1)
#define HAL_ETH_ERROR_INVALID_CALLBACK ((uint32_t)0x00000020U) /*!< Invalid Callback error */
#endif /* USE_HAL_ETH_REGISTER_CALLBACKS */
/**
* @}
*/
У моего STM32F407 нет DMA для Ethernet. Что мне теперь делать? Это ошибка?
Мой полный код:
ETH_TxPacketConfig TxConfig;
ETH_DMADescTypeDef DMARxDscrTab[ETH_RX_DESC_CNT]; /* Ethernet Rx DMA Descriptors */
ETH_DMADescTypeDef DMATxDscrTab[ETH_TX_DESC_CNT]; /* Ethernet Tx DMA Descriptors */
ADC_HandleTypeDef hadc1;
CAN_HandleTypeDef hcan1;
DCMI_HandleTypeDef hdcmi;
DMA_HandleTypeDef hdma_dcmi;
ETH_HandleTypeDef heth;
RTC_HandleTypeDef hrtc;
SPI_HandleTypeDef hspi2;
TIM_HandleTypeDef htim1;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim4;
UART_HandleTypeDef huart5;
SRAM_HandleTypeDef hsram1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_FSMC_Init(void);
static void MX_DCMI_Init(void);
static void MX_SPI2_Init(void);
static void MX_TIM1_Init(void);
static void MX_TIM3_Init(void);
static void MX_ADC1_Init(void);
static void MX_CAN1_Init(void);
static void MX_RTC_Init(void);
static void MX_TIM4_Init(void);
static void MX_DMA_Init(void);
static void MX_UART5_Init(void);
static void MX_ETH_Init(void);
/* USER CODE BEGIN PFP */
void demoLCD(int i);
unsigned long testFillScreen();
unsigned long testText();
unsigned long testLines(uint16_t color);
unsigned long testFastLines(uint16_t color1, uint16_t color2);
unsigned long testRects(uint16_t color);
unsigned long testFilledRects(uint16_t color1, uint16_t color2);
unsigned long testFilledCircles(uint8_t radius, uint16_t color);
unsigned long testCircles(uint8_t radius, uint16_t color);
unsigned long testTriangles();
unsigned long testFilledTriangles();
unsigned long testRoundRects();
unsigned long testFilledRoundRects();
unsigned long testDrawImage();
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void HAL_ETH_RxAllocateCallback(uint8_t **buff){
}
void HAL_ETH_RxLinkCallback(void **pStart, void **pEnd, uint8_t *buff, uint16_t Length){
}
void HAL_ETH_TxFreeCallback(uint32_t *buff){
}
void HAL_ETH_TxCpltCallback(ETH_HandleTypeDef *heth){
}
void HAL_ETH_RxCpltCallback(ETH_HandleTypeDef *heth){
}
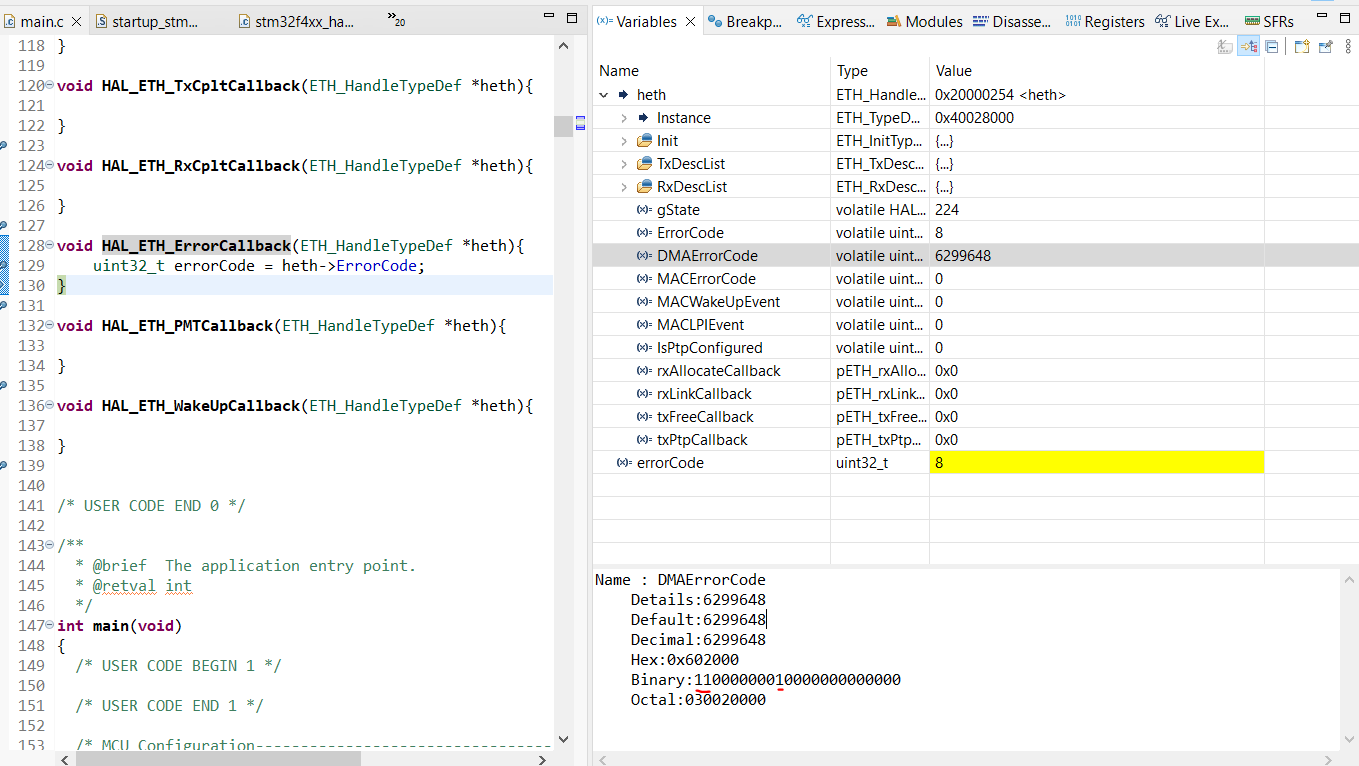
void HAL_ETH_ErrorCallback(ETH_HandleTypeDef *heth){
uint32_t errorCode = heth->ErrorCode;
}
void HAL_ETH_PMTCallback(ETH_HandleTypeDef *heth){
}
void HAL_ETH_WakeUpCallback(ETH_HandleTypeDef *heth){
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_FSMC_Init();
MX_DCMI_Init();
MX_SPI2_Init();
MX_TIM1_Init();
MX_TIM3_Init();
MX_ADC1_Init();
MX_CAN1_Init();
MX_RTC_Init();
MX_TIM4_Init();
MX_DMA_Init();
MX_UART5_Init();
MX_ETH_Init();
/* USER CODE BEGIN 2 */
/* Start up LCD */
HAL_GPIO_WritePin(LCD_RESET_GPIO_Port, LCD_RESET_Pin, GPIO_PIN_SET);
LCD_BL_ON();
lcdInit();
HAL_GPIO_WritePin(ETH_RESET_GPIO_Port, ETH_RESET_Pin, GPIO_PIN_RESET);
HAL_Delay(1);
HAL_GPIO_WritePin(ETH_RESET_GPIO_Port, ETH_RESET_Pin, GPIO_PIN_SET);
/* Enable interrupt */
HAL_ETH_Start_IT(&heth);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 50;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV8;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief ADC1 Initialization Function
* @param None
* @retval None
*/
static void MX_ADC1_Init(void)
{
/* USER CODE BEGIN ADC1_Init 0 */
/* USER CODE END ADC1_Init 0 */
ADC_ChannelConfTypeDef sConfig = {0};
/* USER CODE BEGIN ADC1_Init 1 */
/* USER CODE END ADC1_Init 1 */
/** Configure the global features of the ADC (Clock, Resolution, Data Alignment and number of conversion)
*/
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = DISABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
hadc1.Init.DMAContinuousRequests = DISABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
Error_Handler();
}
/** Configure for the selected ADC regular channel its corresponding rank in the sequencer and its sample time.
*/
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_3CYCLES;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN ADC1_Init 2 */
/* USER CODE END ADC1_Init 2 */
}
/**
* @brief CAN1 Initialization Function
* @param None
* @retval None
*/
static void MX_CAN1_Init(void)
{
/* USER CODE BEGIN CAN1_Init 0 */
/* USER CODE END CAN1_Init 0 */
/* USER CODE BEGIN CAN1_Init 1 */
/* USER CODE END CAN1_Init 1 */
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 16;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_1TQ;
hcan1.Init.TimeSeg2 = CAN_BS2_1TQ;
hcan1.Init.TimeTriggeredMode = DISABLE;
hcan1.Init.AutoBusOff = DISABLE;
hcan1.Init.AutoWakeUp = DISABLE;
hcan1.Init.AutoRetransmission = DISABLE;
hcan1.Init.ReceiveFifoLocked = DISABLE;
hcan1.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN1_Init 2 */
/* USER CODE END CAN1_Init 2 */
}
/**
* @brief DCMI Initialization Function
* @param None
* @retval None
*/
static void MX_DCMI_Init(void)
{
/* USER CODE BEGIN DCMI_Init 0 */
/* USER CODE END DCMI_Init 0 */
/* USER CODE BEGIN DCMI_Init 1 */
/* USER CODE END DCMI_Init 1 */
hdcmi.Instance = DCMI;
hdcmi.Init.SynchroMode = DCMI_SYNCHRO_HARDWARE;
hdcmi.Init.PCKPolarity = DCMI_PCKPOLARITY_RISING;
hdcmi.Init.VSPolarity = DCMI_VSPOLARITY_HIGH;
hdcmi.Init.HSPolarity = DCMI_HSPOLARITY_LOW;
hdcmi.Init.CaptureRate = DCMI_CR_ALL_FRAME;
hdcmi.Init.ExtendedDataMode = DCMI_EXTEND_DATA_8B;
hdcmi.Init.JPEGMode = DCMI_JPEG_DISABLE;
if (HAL_DCMI_Init(&hdcmi) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN DCMI_Init 2 */
/* USER CODE END DCMI_Init 2 */
}
/**
* @brief ETH Initialization Function
* @param None
* @retval None
*/
static void MX_ETH_Init(void)
{
/* USER CODE BEGIN ETH_Init 0 */
/* USER CODE END ETH_Init 0 */
static uint8_t MACAddr[6];
/* USER CODE BEGIN ETH_Init 1 */
/* USER CODE END ETH_Init 1 */
heth.Instance = ETH;
MACAddr[0] = 0x80;
MACAddr[1] = 0x80;
MACAddr[2] = 0xA2;
MACAddr[3] = 0xAE;
MACAddr[4] = 0x13;
MACAddr[5] = 0x41;
heth.Init.MACAddr = &MACAddr[0];
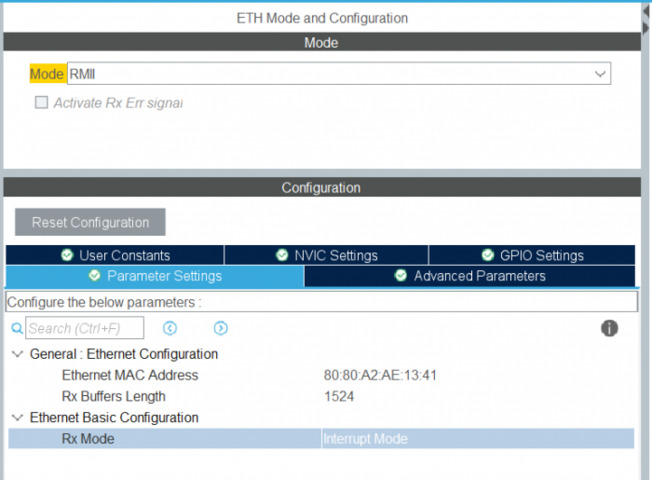
heth.Init.MediaInterface = HAL_ETH_RMII_MODE;
heth.Init.TxDesc = DMATxDscrTab;
heth.Init.RxDesc = DMARxDscrTab;
heth.Init.RxBuffLen = 1524;
/* USER CODE BEGIN MACADDRESS */
/* USER CODE END MACADDRESS */
if (HAL_ETH_Init(&heth) != HAL_OK)
{
Error_Handler();
}
memset(&TxConfig, 0 , sizeof(ETH_TxPacketConfig));
TxConfig.Attributes = ETH_TX_PACKETS_FEATURES_CSUM | ETH_TX_PACKETS_FEATURES_CRCPAD;
TxConfig.ChecksumCtrl = ETH_CHECKSUM_IPHDR_PAYLOAD_INSERT_PHDR_CALC;
TxConfig.CRCPadCtrl = ETH_CRC_PAD_INSERT;
/* USER CODE BEGIN ETH_Init 2 */
/* USER CODE END ETH_Init 2 */
}
/**
* @brief RTC Initialization Function
* @param None
* @retval None
*/
static void MX_RTC_Init(void)
{
/* USER CODE BEGIN RTC_Init 0 */
/* USER CODE END RTC_Init 0 */
/* USER CODE BEGIN RTC_Init 1 */
/* USER CODE END RTC_Init 1 */
/** Initialize RTC Only
*/
hrtc.Instance = RTC;
hrtc.Init.HourFormat = RTC_HOURFORMAT_24;
hrtc.Init.AsynchPrediv = 127;
hrtc.Init.SynchPrediv = 255;
hrtc.Init.OutPut = RTC_OUTPUT_DISABLE;
hrtc.Init.OutPutPolarity = RTC_OUTPUT_POLARITY_HIGH;
hrtc.Init.OutPutType = RTC_OUTPUT_TYPE_OPENDRAIN;
if (HAL_RTC_Init(&hrtc) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN RTC_Init 2 */
/* USER CODE END RTC_Init 2 */
}
/**
* @brief SPI2 Initialization Function
* @param None
* @retval None
*/
static void MX_SPI2_Init(void)
{
/* USER CODE BEGIN SPI2_Init 0 */
/* USER CODE END SPI2_Init 0 */
/* USER CODE BEGIN SPI2_Init 1 */
/* USER CODE END SPI2_Init 1 */
/* SPI2 parameter configuration*/
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI2_Init 2 */
/* USER CODE END SPI2_Init 2 */
}
/**
* @brief TIM1 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_Encoder_InitTypeDef sConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 0;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 65535;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
sConfig.EncoderMode = TIM_ENCODERMODE_TI1;
sConfig.IC1Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC1Prescaler = TIM_ICPSC_DIV1;
sConfig.IC1Filter = 0;
sConfig.IC2Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC2Prescaler = TIM_ICPSC_DIV1;
sConfig.IC2Filter = 0;
if (HAL_TIM_Encoder_Init(&htim1, &sConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
}
/**
* @brief TIM3 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_Encoder_InitTypeDef sConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 0;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 65535;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
sConfig.EncoderMode = TIM_ENCODERMODE_TI1;
sConfig.IC1Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC1Prescaler = TIM_ICPSC_DIV1;
sConfig.IC1Filter = 0;
sConfig.IC2Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC2Prescaler = TIM_ICPSC_DIV1;
sConfig.IC2Filter = 0;
if (HAL_TIM_Encoder_Init(&htim3, &sConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
}
/**
* @brief TIM4 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM4_Init(void)
{
/* USER CODE BEGIN TIM4_Init 0 */
/* USER CODE END TIM4_Init 0 */
TIM_Encoder_InitTypeDef sConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM4_Init 1 */
/* USER CODE END TIM4_Init 1 */
htim4.Instance = TIM4;
htim4.Init.Prescaler = 0;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 65535;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
sConfig.EncoderMode = TIM_ENCODERMODE_TI1;
sConfig.IC1Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC1Prescaler = TIM_ICPSC_DIV1;
sConfig.IC1Filter = 0;
sConfig.IC2Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC2Prescaler = TIM_ICPSC_DIV1;
sConfig.IC2Filter = 0;
if (HAL_TIM_Encoder_Init(&htim4, &sConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM4_Init 2 */
/* USER CODE END TIM4_Init 2 */
}
/**
* @brief UART5 Initialization Function
* @param None
* @retval None
*/
static void MX_UART5_Init(void)
{
/* USER CODE BEGIN UART5_Init 0 */
/* USER CODE END UART5_Init 0 */
/* USER CODE BEGIN UART5_Init 1 */
/* USER CODE END UART5_Init 1 */
huart5.Instance = UART5;
huart5.Init.BaudRate = 115200;
huart5.Init.WordLength = UART_WORDLENGTH_8B;
huart5.Init.StopBits = UART_STOPBITS_1;
huart5.Init.Parity = UART_PARITY_NONE;
huart5.Init.Mode = UART_MODE_TX_RX;
huart5.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart5.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart5) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN UART5_Init 2 */
/* USER CODE END UART5_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA2_CLK_ENABLE();
/* DMA interrupt init */
/* DMA2_Stream1_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA2_Stream1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream1_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOE, ENCODER0_REVERSE_Pin|ENCODER1_REVERSE_Pin|LCD_RESET_Pin|CAMERA_RESET_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, ENCODER2_REVERSE_Pin|SDCARD_CS_Pin|LDAC_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(TOUCH_CS_GPIO_Port, TOUCH_CS_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(LED_LCD_ON_GPIO_Port, LED_LCD_ON_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, ETH_RESET_Pin|OUTPUT3_Pin|OUTPUT2_Pin|SIO_C_Pin
|SIO_D_Pin, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, OUTPUT1_Pin|OUTPUT0_Pin, GPIO_PIN_RESET);
/*Configure GPIO pins : ENCODER0_REVERSE_Pin ENCODER1_REVERSE_Pin LCD_RESET_Pin CAMERA_RESET_Pin */
GPIO_InitStruct.Pin = ENCODER0_REVERSE_Pin|ENCODER1_REVERSE_Pin|LCD_RESET_Pin|CAMERA_RESET_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
/*Configure GPIO pins : ENCODER2_REVERSE_Pin SDCARD_CS_Pin LDAC_Pin */
GPIO_InitStruct.Pin = ENCODER2_REVERSE_Pin|SDCARD_CS_Pin|LDAC_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : TOUCH_CS_Pin */
GPIO_InitStruct.Pin = TOUCH_CS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(TOUCH_CS_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : TOUCH_IRQ_Pin */
GPIO_InitStruct.Pin = TOUCH_IRQ_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(TOUCH_IRQ_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : LED_LCD_ON_Pin */
GPIO_InitStruct.Pin = LED_LCD_ON_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(LED_LCD_ON_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : ETH_RESET_Pin OUTPUT3_Pin OUTPUT2_Pin */
GPIO_InitStruct.Pin = ETH_RESET_Pin|OUTPUT3_Pin|OUTPUT2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : INPUT2_Pin */
GPIO_InitStruct.Pin = INPUT2_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(INPUT2_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : INPUT0_Pin INPUT1_Pin */
GPIO_InitStruct.Pin = INPUT0_Pin|INPUT1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pin : INPUT3_Pin */
GPIO_InitStruct.Pin = INPUT3_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(INPUT3_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : OUTPUT1_Pin OUTPUT0_Pin */
GPIO_InitStruct.Pin = OUTPUT1_Pin|OUTPUT0_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
/*Configure GPIO pins : SIO_C_Pin SIO_D_Pin */
GPIO_InitStruct.Pin = SIO_C_Pin|SIO_D_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
/* FSMC initialization function */
static void MX_FSMC_Init(void)
{
/* USER CODE BEGIN FSMC_Init 0 */
/* USER CODE END FSMC_Init 0 */
FSMC_NORSRAM_TimingTypeDef Timing = {0};
/* USER CODE BEGIN FSMC_Init 1 */
/* USER CODE END FSMC_Init 1 */
/** Perform the SRAM1 memory initialization sequence
*/
hsram1.Instance = FSMC_NORSRAM_DEVICE;
hsram1.Extended = FSMC_NORSRAM_EXTENDED_DEVICE;
/* hsram1.Init */
hsram1.Init.NSBank = FSMC_NORSRAM_BANK1;
hsram1.Init.DataAddressMux = FSMC_DATA_ADDRESS_MUX_DISABLE;
hsram1.Init.MemoryType = FSMC_MEMORY_TYPE_SRAM;
hsram1.Init.MemoryDataWidth = FSMC_NORSRAM_MEM_BUS_WIDTH_16;
hsram1.Init.BurstAccessMode = FSMC_BURST_ACCESS_MODE_DISABLE;
hsram1.Init.WaitSignalPolarity = FSMC_WAIT_SIGNAL_POLARITY_LOW;
hsram1.Init.WrapMode = FSMC_WRAP_MODE_DISABLE;
hsram1.Init.WaitSignalActive = FSMC_WAIT_TIMING_BEFORE_WS;
hsram1.Init.WriteOperation = FSMC_WRITE_OPERATION_ENABLE;
hsram1.Init.WaitSignal = FSMC_WAIT_SIGNAL_DISABLE;
hsram1.Init.ExtendedMode = FSMC_EXTENDED_MODE_DISABLE;
hsram1.Init.AsynchronousWait = FSMC_ASYNCHRONOUS_WAIT_DISABLE;
hsram1.Init.WriteBurst = FSMC_WRITE_BURST_DISABLE;
hsram1.Init.PageSize = FSMC_PAGE_SIZE_NONE;
/* Timing */
Timing.AddressSetupTime = 10;
Timing.AddressHoldTime = 15;
Timing.DataSetupTime = 20;
Timing.BusTurnAroundDuration = 0;
Timing.CLKDivision = 16;
Timing.DataLatency = 17;
Timing.AccessMode = FSMC_ACCESS_MODE_A;
/* ExtTiming */
if (HAL_SRAM_Init(&hsram1, &Timing, NULL) != HAL_OK)
{
Error_Handler( );
}
/* USER CODE BEGIN FSMC_Init 2 */
/* USER CODE END FSMC_Init 2 */
}
Обновлять:
Я нашел код ошибки DMA.
Я получаю эту ошибку отсюда. См. стрелку
/* ETH DMA Error */
if (__HAL_ETH_DMA_GET_IT(heth, ETH_DMASR_AIS))
{
if (__HAL_ETH_DMA_GET_IT_SOURCE(heth, ETH_DMAIER_AISE))
{
heth->ErrorCode |= HAL_ETH_ERROR_DMA;
/* if fatal bus error occurred */
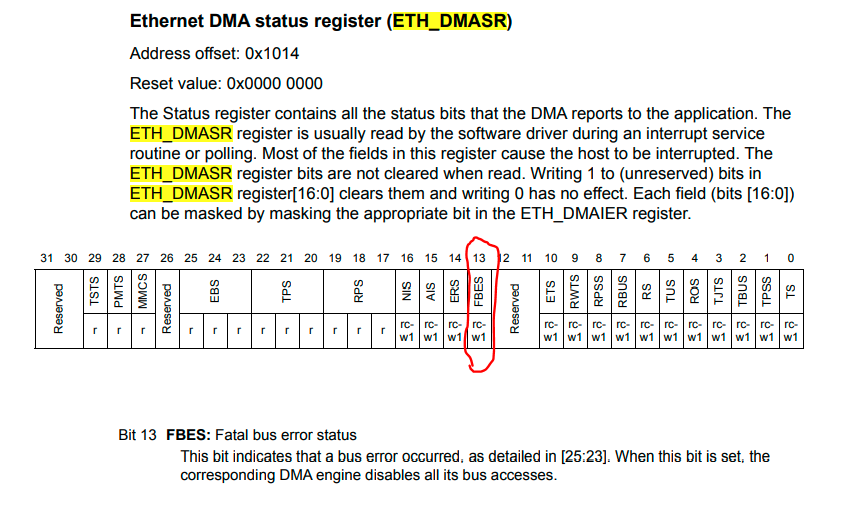
if (__HAL_ETH_DMA_GET_IT(heth, ETH_DMASR_FBES))
{
/* Get DMA error code */
heth->DMAErrorCode = READ_BIT(heth->Instance->DMASR, (ETH_DMASR_FBES | ETH_DMASR_TPS | ETH_DMASR_RPS)); <<--- HERE!
/* Disable all interrupts */
__HAL_ETH_DMA_DISABLE_IT(heth, ETH_DMAIER_NISE | ETH_DMAIER_AISE);
/* Set HAL state to ERROR */
heth->gState = HAL_ETH_STATE_ERROR;
}
else
{
/* Get DMA error status */
heth->DMAErrorCode = READ_BIT(heth->Instance->DMASR, (ETH_DMASR_ETS | ETH_DMASR_RWTS |
ETH_DMASR_RBUS | ETH_DMASR_AIS));
/* Clear the interrupt summary flag */
__HAL_ETH_DMA_CLEAR_IT(heth, (ETH_DMASR_ETS | ETH_DMASR_RWTS |
ETH_DMASR_RBUS | ETH_DMASR_AIS));
}
В сообщении об ошибке говорится, что DMA недоступен для ETH. Это баг тогда?