Самостоятельная функция преобразования подобия изображения
Это домашняя задача, в которой мы пишем самоопределяемые функции, используя лежащую в основе математику для получения прогнозируемого результата. Возьмите набор соответствующих пиксельных координат из двух изображений, где одно изображение («движущееся») является повернутой, масштабированной и переведенной версией первого. Оцените параметры преобразования и примените преобразование ко всем пикселям первого изображения. Это должно создать фиксированное изображение, из которого были взяты соответствующие пиксельные координаты.
Я предоставляю наш код, а также движущиеся, фиксированные и выходные изображения. Встроенная функция и вывод нашего кода должны быть одинаковыми. Визуально кажется, что масштабирование и перемещение отключены, а также, возможно, центр вращения. Мой партнер и я озадачены и ищем подсказки относительно того, как исправить код, чтобы получить правильный результат. Любые рекомендации или предложения приветствуются.
moving_pts=[104,85;135,84;107,145;154,136;110,22;183,148;62,124;99,186];
fixed_pts=[95,97;127,102;88,158;138,158;113,37;161,174;49,128;72,198];
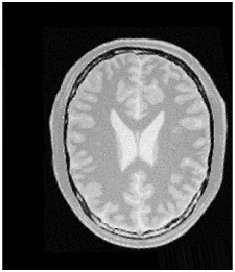
moving_image = imread('BrainProtonDensitySliceR10X13Y17.png');
output=xformed_image(fixed_pts, moving_pts, moving_image)
function output=xformed_image(fixed_pts, moving_pts, moving_image)
%get the size for moving image
[x,y,z]=size(moving_image);
%pre-allocate the image for output
output=zeros(x,y,z);
%get the translation parameters
theta=getTheta(moving_pts, fixed_pts);
%rotate the image and get the intensity value
output=getRotate(moving_image, theta);
end
function theta=getTheta(g, f)
% g is the points from moving image
% f is the correspondences points from fixed image
%get the size
[row,col]=size(g);
% pre-allocate the size for theta
theta=zeros(4,1);
g=g+1;
f=f+1;
%pre-allocate the size for X
X=zeros(4,4);
for i=1:row
Xi=[1,0,g(i,1),g(i,2);
0,1,g(i,2),-g(i,1)];
X=X+Xi'*Xi;
end
%pre-allocate the size for Y
Y=zeros(4,1);
for i=1:row
Xi=[1,0,g(i,1),g(i,2);
0,1,g(i,2),-g(i,1)];
Y=Y+Xi'*f(i,:)';
end
theta=inv(X)*Y;
end
function R=getRotate(m, theta)
%m is the moving image
%theta is the translation parameters
%get the size of moving image
[x,y,z]=size(m);
%pre-allocate the size for rotation ans shifting
R=zeros(x, y, z);
R=uint8(R);
%shifting matrix
shiftMatrix=[x/2;y/2];
%scaling matrix for Similarity
scaleMatrix=[theta(1); theta(2)];
%rotate matrix
rotateMatrix=[theta(3),theta(4); -theta(4), theta(3)];
%iterate each channel
for d=1:z
for i=1:x
for j=1:y
%new image point set
newImagePoint=[i;j];
%Step1: shift to the origin
shiftPoint=newImagePoint-shiftMatrix;
%Step2: rotate based on the translation parameters
rotatePoint=scaleMatrix+rotateMatrix'*shiftPoint;
%Step3: shifted the image back to the original center
originalImagePoint=rotatePoint+shiftMatrix; %final (x,y)
originalImageX=uint8(originalImagePoint(1));
originalImageY=uint8(originalImagePoint(2));
%Step4: interpolate to get the intensity value
if(originalImageX>=1 && originalImageX<x && originalImageY>=1 && originalImageY<y)
R(i,j,d)=getInterpolate(m, d, originalImagePoint);
%R(i, j, d)=m(originalImageX,originalImageY,d);
end
end
end
end
end
function intensity=getInterpolate(m,channel,originalImagePoint)
%m is the moving image
%rotatedBackPoint is the rotated back x,y value
x=uint8(originalImagePoint(1));
y=uint8(originalImagePoint(2));
lambda=originalImagePoint(1)-double(x);
mu=originalImagePoint(2)-double(y);
f1=mu*double(m(x,y+1,channel))+(1-mu)*double(m(x,y,channel));
f2=mu*double(m(x+1,y+1,channel))+(1-mu)*double(m(x+1,y,channel));
intensity=lambda*f2+(1-lambda)*f1;
intensity=uint8(intensity);
end
Входное изображение
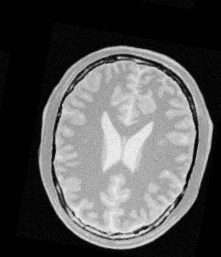
Фиксированное изображение, которое должно выглядеть на выходе, выглядит следующим образом:
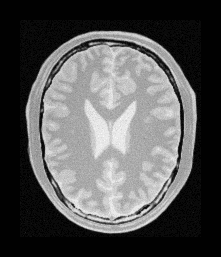
Наш вывод такой: