Масштабирование изображения YUV420 с использованием libyuv приводит к странным выводам
Возможный дубликат этого вопроса с основными частями, выбранными здесь. Я пробовал все решения, которые были там предоставлены, они не работают для меня.
Фон
Я снимаю изображение в формате изображения YUV_420_888, возвращенном из ARCore frame.acquireCameraImage() метод. Поскольку я установил конфигурацию камеры на разрешение 1920*1080, мне нужно уменьшить ее до 224*224, чтобы передать ее в реализацию tenorflow-lite. Я делаю это с помощью библиотеки LibYuv через Android NDK.
Реализация
Подготовьте рамки изображения
//Figure out the source image dimensions
int y_size = srcWidth * srcHeight;
//Get dimensions of the desired output image
int out_size = destWidth * destHeight;
//Generate input frame
i420_input_frame.width = srcWidth;
i420_input_frame.height = srcHeight;
i420_input_frame.data = (uint8_t*) yuvArray;
i420_input_frame.y = i420_input_frame.data;
i420_input_frame.u = i420_input_frame.y + y_size;
i420_input_frame.v = i420_input_frame.u + (y_size / 4);
//Generate output frame
free(i420_output_frame.data);
i420_output_frame.width = destWidth;
i420_output_frame.height = destHeight;
i420_output_frame.data = new unsigned char[out_size * 3 / 2];
i420_output_frame.y = i420_output_frame.data;
i420_output_frame.u = i420_output_frame.y + out_size;
i420_output_frame.v = i420_output_frame.u + (out_size / 4);
Я масштабирую свое изображение с помощью Libyuv's I420Scale метод
libyuv::FilterMode mode = libyuv::FilterModeEnum::kFilterBox;
jint result = libyuv::I420Scale(i420_input_frame.y, i420_input_frame.width,
i420_input_frame.u, i420_input_frame.width / 2,
i420_input_frame.v, i420_input_frame.width / 2,
i420_input_frame.width, i420_input_frame.height,
i420_output_frame.y, i420_output_frame.width,
i420_output_frame.u, i420_output_frame.width / 2,
i420_output_frame.v, i420_output_frame.width / 2,
i420_output_frame.width, i420_output_frame.height,
mode);
и верни его в Java
//Create a new byte array to return to the caller in Java
jbyteArray outputArray = env -> NewByteArray(out_size * 3 / 2);
env -> SetByteArrayRegion(outputArray, 0, out_size, (jbyte*) i420_output_frame.y);
env -> SetByteArrayRegion(outputArray, out_size, out_size / 4, (jbyte*) i420_output_frame.u);
env -> SetByteArrayRegion(outputArray, out_size + (out_size / 4), out_size / 4, (jbyte*) i420_output_frame.v);
Фактическое изображение: 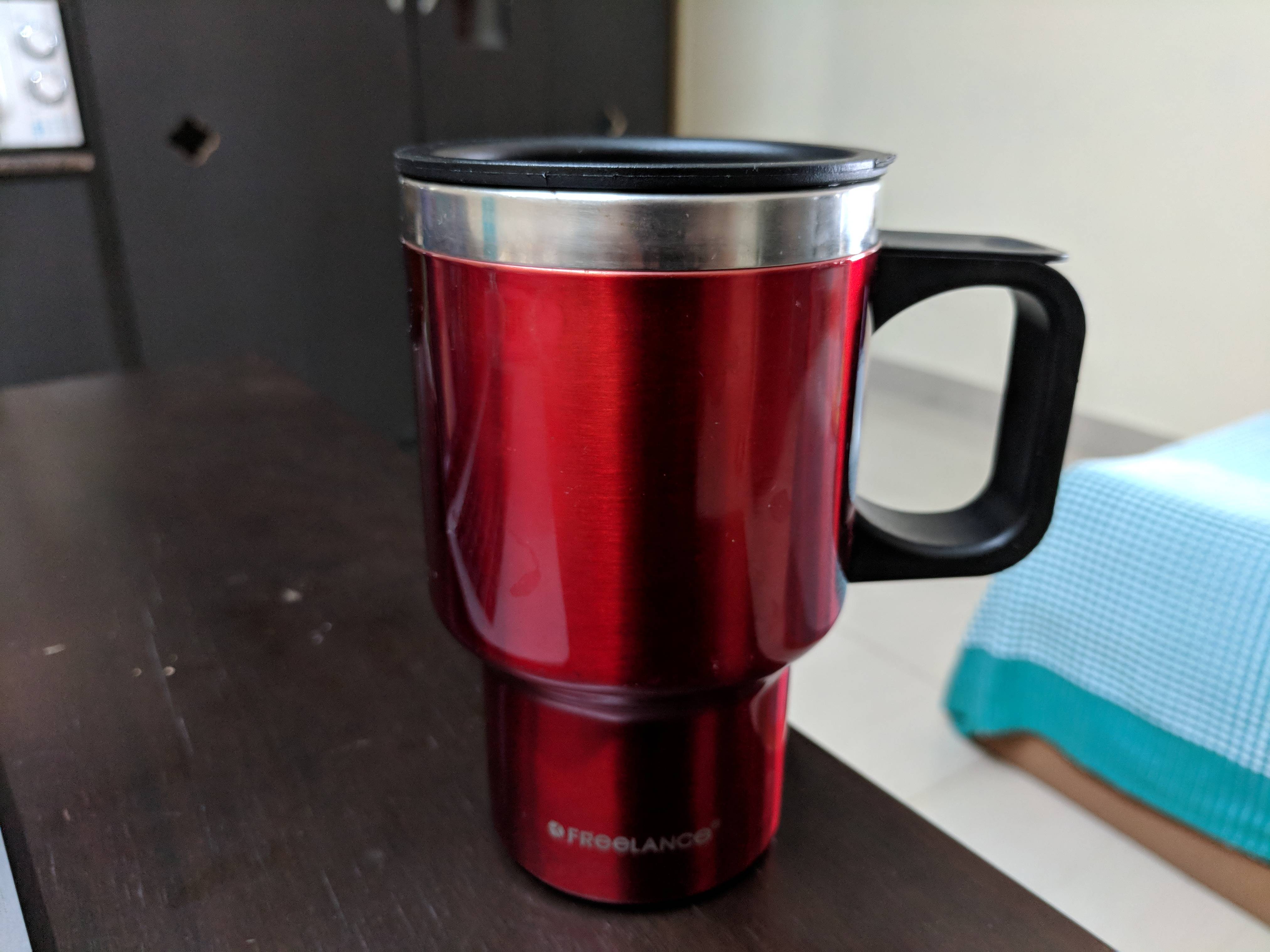
Как выглядит масштабирование поста:

Как это выглядит, если я создаю изображение из i420_input_frame без масштабирования:
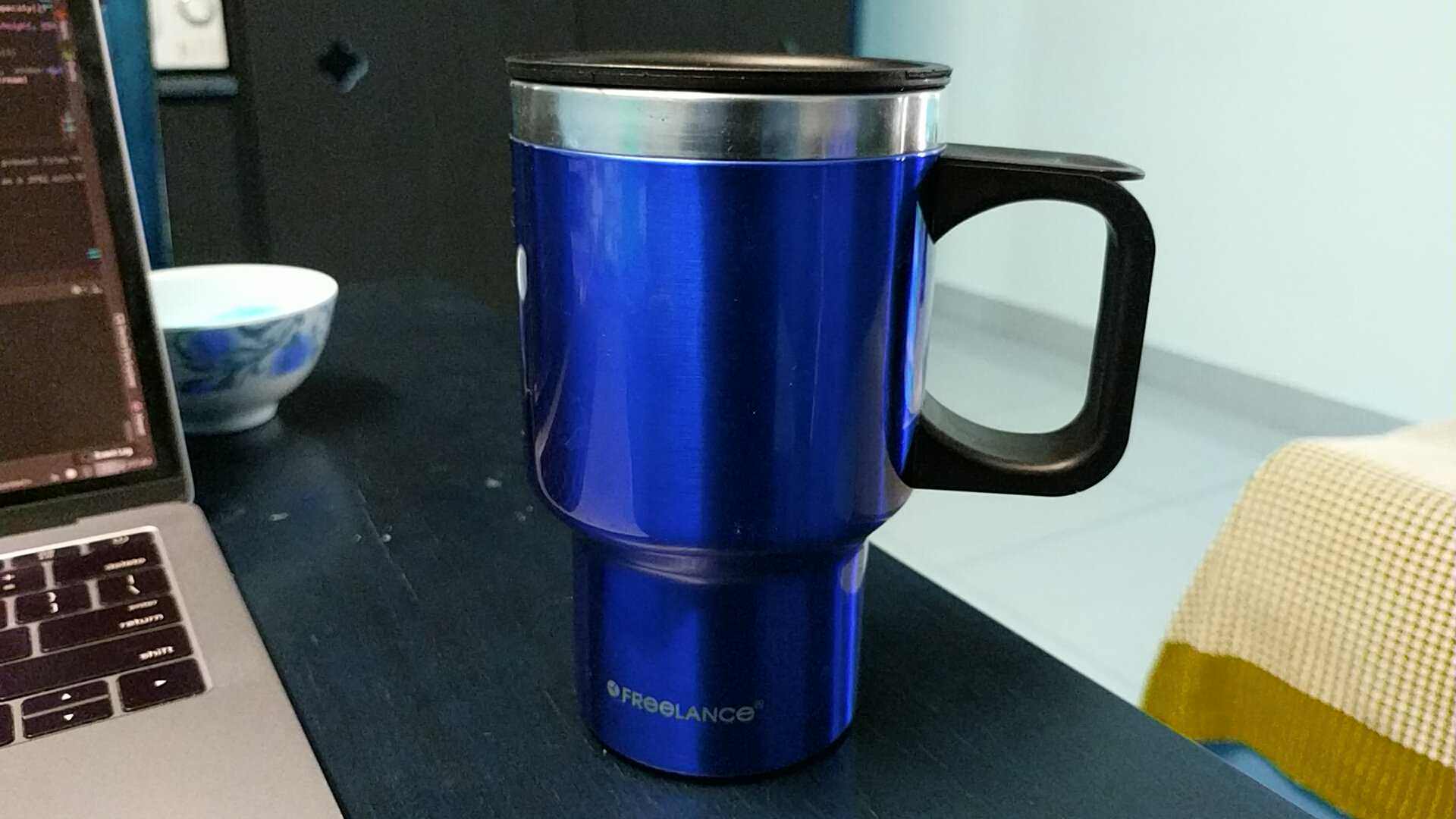
Так как масштабирование портит цвета много раз, тензорный поток не может правильно распознать объекты. (Это правильно распознается в их примере приложения) Что я делаю не так, чтобы испортить цвета?
2 ответа
Либо я делал что-то не так (что я не смог исправить), либо LibYuv неправильно обрабатывает цвета при работе с изображениями YUV из Android.
Обратитесь к официальной ошибке, опубликованной в библиотеке Libyuv: https://bugs.chromium.org/p/libyuv/issues/detail?id=815&can=1&q=&sort=-id
Они предложили мне использовать метод Android420ToI420() Сначала я применяю любые необходимые мне преобразования. Я в конечном итоге с помощью Android420ToI420() сначала масштабирование, затем преобразование в RGB. В конце концов, результат был немного лучше, чем изображение чашки, размещенное выше, но искаженные цвета все еще присутствовали. В итоге я использовал OpenCV, чтобы уменьшить изображение и преобразовать его в форматы RGBA или RGB.
// The camera image received is in YUV YCbCr Format at preview dimensions
// so we will scale it down to 224x224 size using OpenCV
// Y plane (0) non-interleaved => stride == 1; U/V plane interleaved => stride == 2
// Refer : https://developer.android.com/reference/android/graphics/ImageFormat.html#YUV_420_888
val cameraPlaneY = cameraImage.planes[0].buffer
val cameraPlaneUV = cameraImage.planes[1].buffer
// Create a new Mat with OpenCV. One for each plane - Y and UV
val y_mat = Mat(cameraImage.height, cameraImage.width, CvType.CV_8UC1, cameraPlaneY)
val uv_mat = Mat(cameraImage.height / 2, cameraImage.width / 2, CvType.CV_8UC2, cameraPlaneUV)
var mat224 = Mat()
var cvFrameRGBA = Mat()
// Retrieve an RGBA frame from the produced YUV
Imgproc.cvtColorTwoPlane(y_mat, uv_mat, cvFrameRGBA, Imgproc.COLOR_YUV2BGRA_NV21)
//Then use this frame to retrieve all RGB channel data
//Iterate over all pixels and retrieve information of RGB channels
for(rows in 1 until cvFrameRGBA.rows())
for(cols in 1 until cvFrameRGBA.cols()) {
val imageData = cvFrameRGBA.get(rows, cols)
// Type of Mat is 24
// Channels is 4
// Depth is 0
rgbBytes.put(imageData[0].toByte())
rgbBytes.put(imageData[1].toByte())
rgbBytes.put(imageData[2].toByte())
}
Проблема с цветом вызвана тем, что вы работаете с другим форматом YUV. Формат YUV, используемый каркасом камеры, - это YUV NV21. Этот формат (NV21) является стандартным форматом изображения для предварительного просмотра камеры Android. Плоское изображение YUV 4:2:0 с 8-битными выборками Y, за которым следует чередующаяся плоскость V/U с 8-битными выборками цветности 2x2 с субдискретизацией.
Если ваши цвета перевернуты, это означает, что:
- Вы работаете с YUV NV12 (плоскость U - это V, а V - это U).
- Одна из ваших цветовых плоскостей делает что-то странное.
Правильно работать с libyuv Я предлагаю вам преобразовать выход камеры в YUV I420, используя transformI420 метод и отправка формата по параметру:
return libyuv::ConvertToI420(src, srcSize, //src data
dstY, dstWidth, //dst planes
dstU, dstWidth / 2,
dstV, dstWidth / 2,
cropLeft, cropTop, //crop start
srcWidth, srcHeight, //src dimensions
cropRight - cropLeft, cropBottom - cropTop, //dst dimensions
rotationMode,
libyuv::FOURCC_NV21); //libyuv::FOURCC_NV12
После этого преобразования вы сможете правильно работать с libyuv, используя все I420scale, I420rotate... и так далее. Ваш метод масштабирования должен выглядеть следующим образом:
JNIEXPORT jint JNICALL
Java_com_aa_project_images_yuv_myJNIcl_scaleI420(JNIEnv *env, jclass type,
jobject srcBufferY,
jobject srcBufferU,
jobject srcBufferV,
jint srcWidth, jint srcHeight,
jobject dstBufferY,
jobject dstBufferU,
jobject dstBufferV,
jint dstWidth, jint dstHeight,
jint filterMode) {
const uint8_t *srcY = static_cast<uint8_t *>(env->GetDirectBufferAddress(srcBufferY));
const uint8_t *srcU = static_cast<uint8_t *>(env->GetDirectBufferAddress(srcBufferU));
const uint8_t *srcV = static_cast<uint8_t *>(env->GetDirectBufferAddress(srcBufferV));
uint8_t *dstY = static_cast<uint8_t *>(env->GetDirectBufferAddress(dstBufferY));
uint8_t *dstU = static_cast<uint8_t *>(env->GetDirectBufferAddress(dstBufferU));
uint8_t *dstV = static_cast<uint8_t *>(env->GetDirectBufferAddress(dstBufferV));
return libyuv::I420Scale(srcY, srcWidth,
srcU, srcWidth / 2,
srcV, srcWidth / 2,
srcWidth, srcHeight,
dstY, dstWidth,
dstU, dstWidth / 2,
dstV, dstWidth / 2,
dstWidth, dstHeight,
static_cast<libyuv::FilterMode>(filterMode));
}
Если вы хотите преобразовать это изображение в JPEG после всего процесса. Ты можешь использовать I420toNV21 метод и после этого использовать Android преобразования нативных из YUV в JPEG. Также вы можете использовать libJpegTurbo, которая является дополнительной библиотекой для подобных ситуаций.
Надеюсь, что это помогло вам!