Как отправлять и получать данные через UART между двумя Arduino Unos
Я работаю над этой проблемой в течение некоторого времени и мне удалось получить частичную оценку. Я хотел бы знать, что не так с моим кодом, что мешает мне добиться успеха при определенных условиях
Мне нужен один arduino для связи с другим, отправив строку символов. Пока мне удалось отправить и получить некоторые данные, но думаю, что у меня может быть проблема с буфером, который я установил в своей функции uart_receive_string(). Я предоставлю всю необходимую информацию и код, необходимые для проверки этого, просто дайте мне знать, если потребуется дополнительная информация, и я буду рад предоставить.
Вот ссылка на драйвер tinkercad: https://www.tinkercad.com/things/eUZqkaIHp6J
Просто нажмите "Копировать и повозиться" и нажмите кнопку кода вверху, чтобы вставить в него приведенный ниже код. Вам нужно будет вставить код в оба ardunios, выбрав их в раскрывающемся списке.

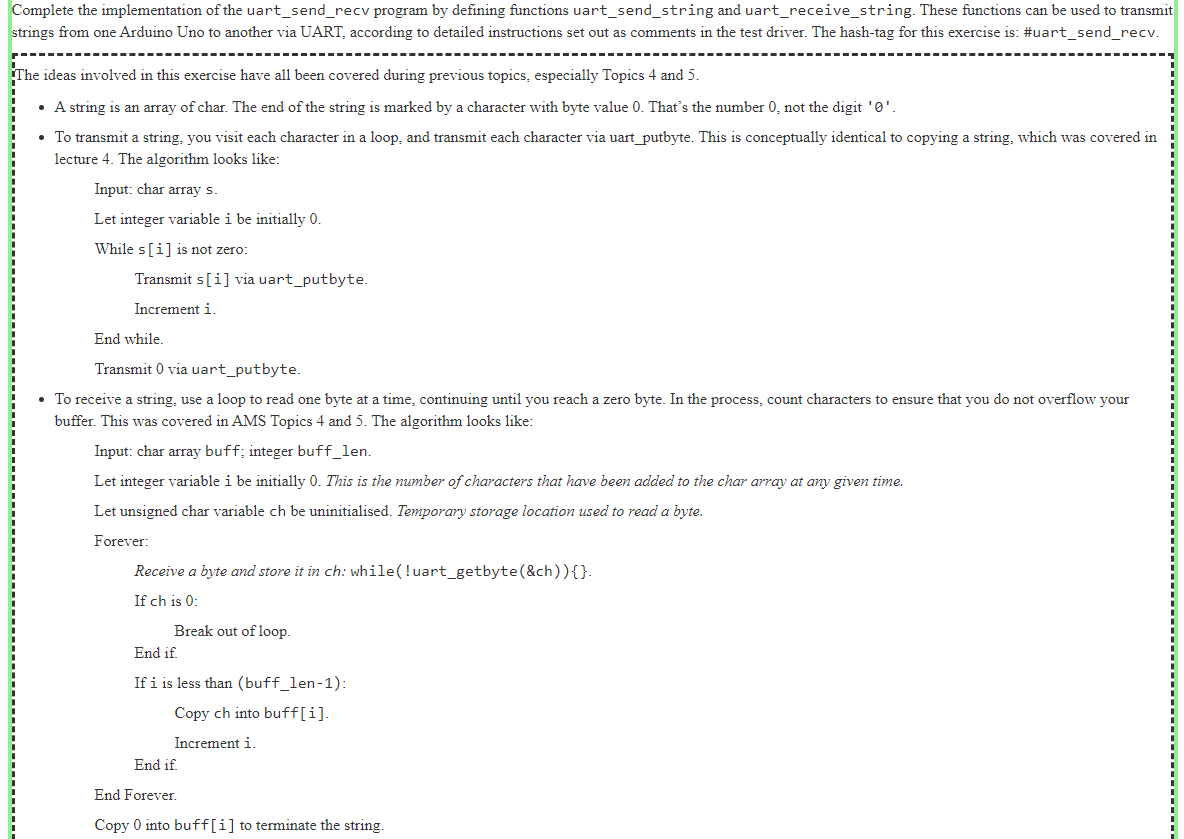
Это критерии для вопроса, над которым я работаю:
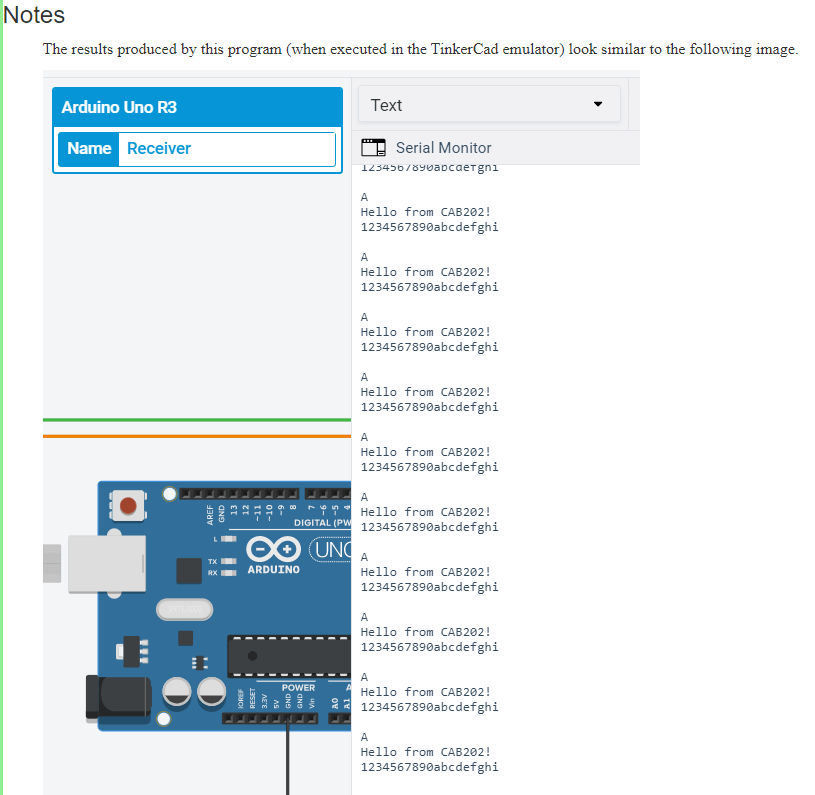
Вот результат, который я должен получить в предоставленном тестовом драйвере:
Вот текущий код, который я реализовал:
Это то, что нужно скопировать в tinkercad для обоих Arduino.
#include <stdint.h>
#include <stdio.h>
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/delay.h>
void uart_putbyte(unsigned char data);
int uart_getbyte(unsigned char *buffer);
/*
** Define a function named uart_send_string which transmits the contents of
** a standard C string (i.e. a null-terminated char array) over UART. The
** function should iterate over the characters in the array, using a cast to
** convert each to an unsigned char, and transmitting the resulting byte via
** uart_putbyte. The end of the string should be signalled by sending a single
** null byte. That is, the number 0, not the character '0'.
**
** Param: str - string to be transmitted.
**
** Returns: Nothing.
*/
// vvvvvvv I need help with this vvvvvvv
void uart_send_string(char str[])
{
int i = 0;
char ch;
do{
ch = str[i];
uart_putbyte(ch);
i++;
}while(ch != '\0');
}
/*
** Define a function named uart_receive_string which uses uart_getbyte to fetch
** the contents of a standard C string (i.e. a null-terminated char array)
** from UART. The function should wait for characters, and must not return
** until a complete string has been retrieved.
**
** Note that uart_getbyte will return 1 if a byte is available, and zero
** otherwise. Therefore, to fetch a byte and store it in a variable named x,
** you will need to use a construct of the form:
** unsigned char x;
** while (! uart_getbyte(&x)) {
** // Do nothing.
** }
**
** Param: buffer - a char array which has capacity to store a string
** containing at most (buff_len-1) characters. If more than (buff_len-1)
** characters are received, the first (buff_len-1) of them should be
** stored consecutively in the buffer, and any others discarded. The
** string must be terminated correctly with a null terminator in all
** circumstances.
**
** Param: buff_len - an int which specifies the capacity of the buffer.
**
** Returns: Nothing. However, up to buff_len elements of buffer may have been
** overwritten by incoming data.
*/
//vvvvvvv I need help with this vvvvvvv
void uart_receive_string(char buffer[], int buff_len)
{
int i = 0;
unsigned char ch;
while(!uart_getbyte(&ch))
{
if(ch == 0)
{
break;
}
if(i < buff_len-1)
{
ch = buffer[i];
uart_putbyte(ch);
i++;
}
}
buffer[i]=0;
}
/*
***************************************************************************
** Initialise UART.
***************************************************************************
*/
void uart_init(void) {
UBRR0 = F_CPU / 16 / 9600 - 1;
UCSR0A = 0;
UCSR0B = (1 << RXEN0) | (1 << TXEN0);
UCSR0C = (3 << UCSZ00);
}
/*
**************************************************************************
** Send one byte, protecting against overrun in the transmit buffer.
**
** Param: data - a byte to be transmitted.
**
** Returns: Nothing.
***************************************************************************
*/
#ifndef __AMS__
void uart_putbyte(unsigned char data) {
// Wait for empty transmit buffer
while (!(UCSR0A & (1 << UDRE0)));
// Send data by assigning into UDR0
UDR0 = data;
}
#endif
/*
***************************************************************************
** Attempt to receive one byte, returning immediately to sender.
**
** Param: buffer - the address of a byte in which a result may be stored.
**
** Returns: If a byte is available returns 1 and stores the incoming byte in
** location referenced by buffer. Otherwise returns 0 and makes no other
** change to the state.
***************************************************************************
*/
#ifndef __AMS__
int uart_getbyte(unsigned char *buffer) {
// If receive buffer contains data...
if (UCSR0A & (1 << RXC0)) {
// Copy received byte from UDR0 into memory location (*buffer)
*buffer = UDR0;
//
return 1;
}
else {
return 0;
}
}
#endif
/*
***************************************************************************
** Implement main event loop.
***************************************************************************
*/
void process() {
// Use two devices, as indicated in the supplied TinkerCad model. One
// device acts as the sender (is_sender = 1), the other as receiver
// (is_sender = 0). Change this to set the role accordingly.
const int is_sender = 1;
if (is_sender) {
static char * messages_to_send[] = {
"", // Empty string
"A", // String with one symbol.
"Hello from CAB202!", // Multiple symbols
"1234567890abcdefghijklmnopqrstuvwxyz", // Longer than buffer size.
NULL, // End of list
};
static int next_message = 0;
uart_send_string(messages_to_send[next_message]);
next_message ++;
if (messages_to_send[next_message] == NULL) next_message = 0;
_delay_ms(300);
}
else {
#define BUFF_SIZE 20
char buffer[BUFF_SIZE];
uart_receive_string(buffer, BUFF_SIZE);
uart_send_string(buffer);
uart_putbyte('\r');
uart_putbyte('\n');
}
}
int main(void) {
uart_init();
while (1) {
process();
}
return 0;
}
Области этого кода, над которыми я должен работать, следующие:
Это необходимо для отправки данных:
void uart_send_string(char str[])
{
int i = 0;
char ch;
do{
ch = str[i];
uart_putbyte(ch);
i++;
}while(ch != '\0');
}
Это необходимо для получения данных:
void uart_receive_string(char buffer[], int buff_len)
{
int i = 0;
unsigned char ch;
while(!uart_getbyte(&ch))
{
if(ch == 0)
{
break;
}
if(i < buff_len-1)
{
ch = buffer[i];
uart_putbyte(ch);
i++;
}
}
buffer[i]=0;
}
Мне очень жаль, если это трудно понять. Я сделаю все возможное, чтобы уточнить любую дополнительную информацию, которая потребуется. Мне просто нужно понять, что я делаю неправильно.