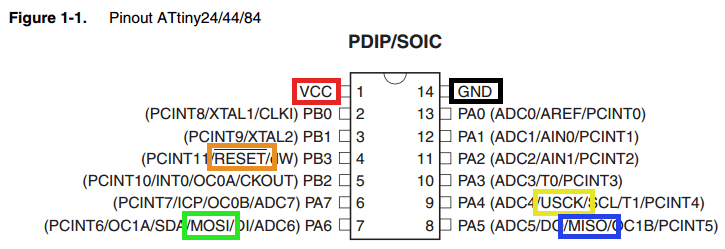
Attiny 84 Общение с RTC через проблемы SPI
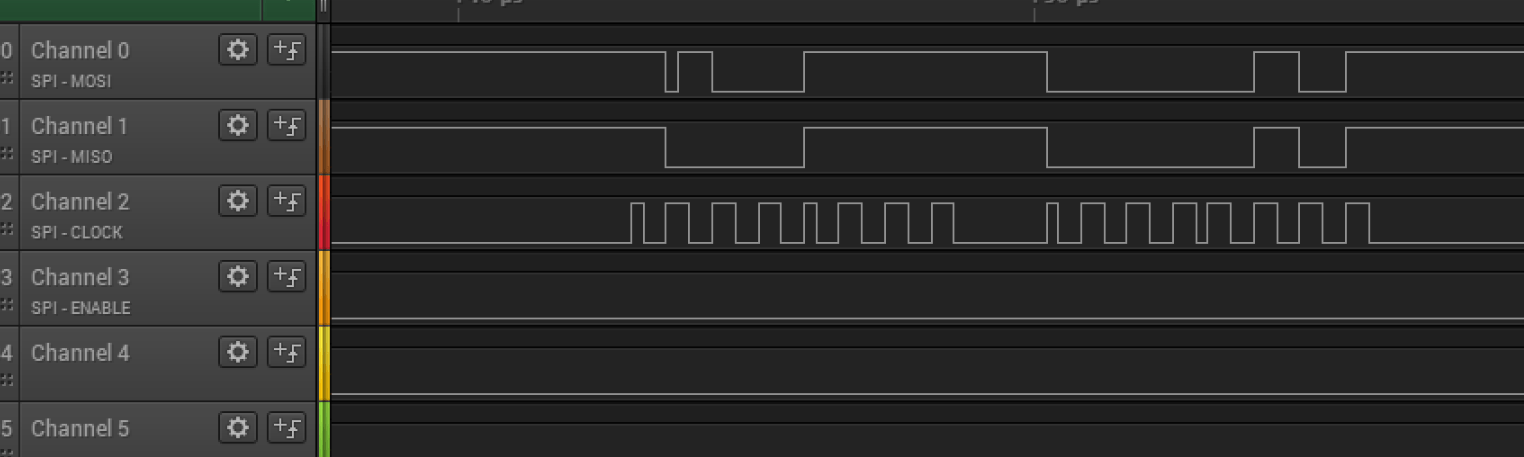
В настоящее время я пытаюсь использовать ATtiny84 для связи с RTC (DS1305) через SPI, чтобы зуммер вибрировал каждый переменный промежуток времени. Я пытался установить alarm0 на DS1305. Однако у 84 нет "технически" SPI. Он имеет USI, который может быть запрограммирован как SPI. Мне было интересно, если кто-нибудь из вас может проверить мои соединения кода / платы и сообщить мне, если вы видите какие-либо проблемы. В настоящее время проблема заключается в том, что я не могу получить какое-либо сообщение через SPI, и у меня возникают проблемы с поиском причины проблемы.
Текущие соединения платы:
ATtiny84 | DS1305
MOSI ------ DI
MISO ------ DO
USCLK ---- CLK
Листки:


/*
* Atmel_Jolt_Code.c
*
* Created: 11/28/2018 10:44:30 PM
* Author : Nick Hulsey
*/
#include <avr/io.h>
#define F_CPU 16000000UL
#include <avr/interrupt.h>
#include <util/delay.h>
//variables for SPI
#define SPI_DDR_PORT DDRA
#define CE_PIN DDA3 //I ADDED *****
#define DO_DD_PIN DDA5 // SHOULD WE
#define DI_DD_PIN DDA6 // THEM FLIP
#define USCK_DD_PIN DDA4
#define SPI_MODE0 0x00
#define SPI_MODE1 0x04
#define MOTOR_PIN DDA7 //I ADDED *****
void SPI_begin();
void setDataMode(uint8_t spiDataMode);
uint8_t transfer(uint8_t spiData);
void flipLatch(uint8_t on);
int main(void)
{
SPI_begin();
setDataMode(SPI_MODE1);
DDRA |= (1 << MOTOR_PIN);
//**startup**
uint8_t status_register = 0x10;
uint8_t control_register = 0x8F;
uint8_t control_byte = 0x05;
uint8_t alarm_registers[] = {0x8A, 0x89, 0x88, 0x87};
//set control
flipLatch(1);
transfer(control_register);
transfer(0);
flipLatch(0);
flipLatch(1);
transfer(control_register);
transfer(control_byte);
flipLatch(0);
//set alarm:
for (int i = 0; i < 4; i++){
flipLatch(1);
transfer(alarm_registers[i]);
transfer(0x80); //0b10000000
flipLatch(0);
}
//THIS MIGHT NEED WORK
//GIMSK |= (1 << PCIE1);//set external interrupt (A1)
PCMSK0 |= (1 << PCINT1);
sei();
while (1) //our main loop
{
//reading the flag from the status register
uint8_t status = transfer(status_register);
if(status == 0x01){//if alarm 0 has been flagged
PORTA ^= (1 << MOTOR_PIN);
_delay_ms(100);
}
}
}
//if A1 has changed state at all this function will fire
ISR(PCINT1_vect){
PORTA ^= (1 << MOTOR_PIN);//invert motor power
_delay_ms(100);
}
void SPI_begin(){
USICR &= ~((1 << USISIE) | (1 << USIOIE) | (1 << USIWM0));//Turn off these bits
USICR |= (1 << USIWM0) | (1 << USICS1) | (1 << USICLK);//Turn on these bits
//REVIEW THIS PAGE 128
//external,positive edge software clock
//What does this mean
SPI_DDR_PORT |= 1 << USCK_DD_PIN; // set the USCK pin as output
SPI_DDR_PORT |= 1 << DO_DD_PIN; // set the DO pin as output
SPI_DDR_PORT |= 1 << CE_PIN;// ******** I ADDED
SPI_DDR_PORT &= ~(1 << DI_DD_PIN); // set the DI pin as input
}
void setDataMode(uint8_t spiDataMode)
{
if (spiDataMode == SPI_MODE1)
USICR |= (1 << USICS0);
else
USICR &= (1 << USICS0);
}
//returns values returned from the IC
uint8_t transfer(uint8_t spiData)
{
USIDR = spiData;
USISR = (1 << USIOIF); // clear counter and counter overflow interrupt flag
//ATOMIC_BLOCK(ATOMIC_RESTORESTATE) // ensure a consistent clock period
//{
while ( !(USISR & (1 << USIOIF)) ) USICR |= (1 << USITC);
//}
return USIDR;
}
void flipLatch(uint8_t on){
if (on == 1)
PORTA |= (1 << CE_PIN);
else
PORTA &= ~(1 << CE_PIN);
}