OpenCV Image Aligment с использованием ORB
Мне нужно точно выровнять два изображения. Для этого я использую Расширенный коэффициент корреляции (ECC). Что дает мне отличные результаты, за исключением изображений, которые часто вращаются. Например, если эталонное изображение (базовое изображение) и тестируемое изображение (которое я хочу выровнять) повернуты на 90 градусов, метод ECC не работает, что верно в соответствии с документацией findTransformECC(), в которой говорится
Обратите внимание, что если изображения подвергаются сильным смещениям / поворотам, необходимо первоначальное преобразование, которое приблизительно выравнивает изображения (например, простое евклидово преобразование / преобразование подобия, которое допускает изображения, показывающие примерно одинаковое содержание изображения).
Поэтому я должен использовать метод выравнивания на основе характерных точек, чтобы выполнить грубое выравнивание. Я попробовал и SIFT и ORB, и я столкнулся с той же самой проблемой с обоими. Он хорошо работает для некоторых изображений, а для других результирующее преобразование смещено или повернуто на неправильную сторону.
Это входные изображения: 

Я думал, что проблема вызвана неправильными совпадениями, но если я использую только 10 ключевых точек с меньшим расстоянием, мне кажется, что все они являются хорошими совпадениями (у меня точно такой же результат, когда я использую 100 ключевых точек)
Это результат соответствия: 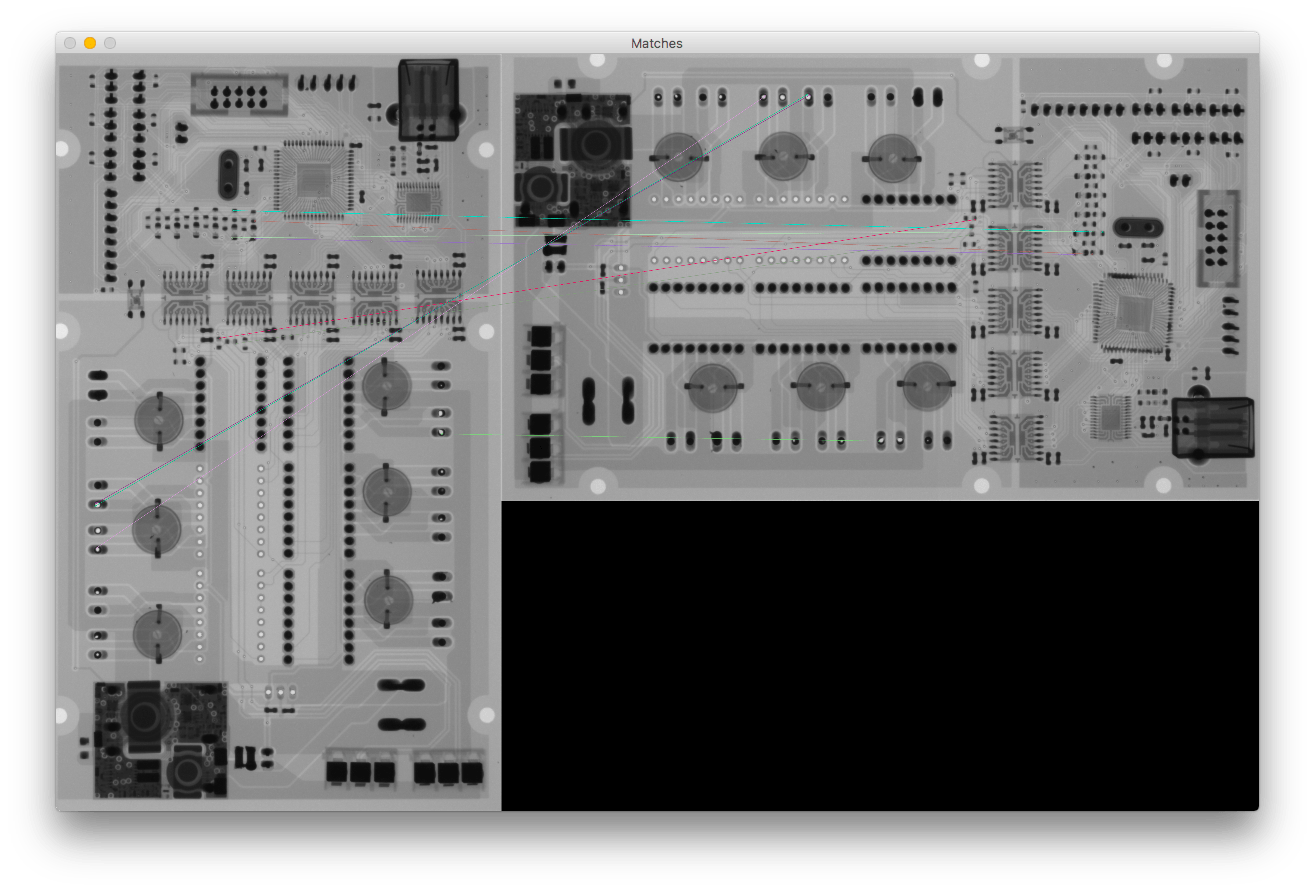
Это результат: 
Если вы сравните повернутое изображение, оно сместится вправо и вверх ногами. Что мне не хватает?
Это мой код:
# Initiate detector
orb = cv2.ORB_create()
# find the keypoints with ORB
kp_base = orb.detect(base_gray, None)
kp_test = orb.detect(test_gray, None)
# compute the descriptors with ORB
kp_base, des_base = orb.compute(base_gray, kp_base)
kp_test, des_test = orb.compute(test_gray, kp_test)
# Debug print
base_keypoints = cv2.drawKeypoints(base_gray, kp_base, color=(0, 0, 255), flags=0, outImage=base_gray)
test_keypoints = cv2.drawKeypoints(test_gray, kp_test, color=(0, 0, 255), flags=0, outImage=test_gray)
output.debug_show("Base image keypoints",base_keypoints, debug_mode=debug_mode,fxy=fxy,waitkey=True)
output.debug_show("Test image keypoints",test_keypoints, debug_mode=debug_mode,fxy=fxy,waitkey=True)
# find matches
# create BFMatcher object
bf = cv2.BFMatcher(cv2.NORM_HAMMING, crossCheck=True)
# Match descriptors.
matches = bf.match(des_base, des_test)
# Sort them in the order of their distance.
matches = sorted(matches, key=lambda x: x.distance)
# Debug print - Draw first 10 matches.
number_of_matches = 10
matches_img = cv2.drawMatches(base_gray, kp_base, test_gray, kp_test, matches[:number_of_matches], flags=2, outImg=base_gray)
output.debug_show("Matches", matches_img, debug_mode=debug_mode,fxy=fxy,waitkey=True)
# calculate transformation matrix
base_keypoints = np.float32([kp_base[m.queryIdx].pt for m in matches[:number_of_matches]]).reshape(-1, 1, 2)
test_keypoints = np.float32([kp_test[m.trainIdx].pt for m in matches[:number_of_matches]]).reshape(-1, 1, 2)
# Calculate Homography
h, status = cv2.findHomography(base_keypoints, test_keypoints)
# Warp source image to destination based on homography
im_out = cv2.warpPerspective(test_gray, h, (base_gray.shape[1], base_gray.shape[0]))
output.debug_show("After rotation", im_out, debug_mode=debug_mode, fxy=fxy)
0 ответов
Ответ на эту проблему является и мирским и раздражающим. Предполагая, что это та же самая проблема, с которой я столкнулся (я думаю, что это так):
Проблема и объяснение Изображения сохраняются большинством камер с тегами EXIF, которые содержат значение "Ориентация". Начиная с OpenCV 3.2, этот тег ориентации автоматически считывается, когда изображение загружается с помощью cv.imread(), и изображение ориентируется на основе тега (существует 8 возможных ориентаций, которые включают в себя поворот на 90*, отражение и отражение). Некоторые приложения для просмотра изображений (такие как Image Viewer в Linux Mint Cinnamon и Adobe Photoshop) отображают изображения, повернутые в направлении тега ориентации EXIF. Другие приложения (такие как QGIS и OpenCV < 3.2) игнорируют тег. Если ваше изображение 1 имеет тег ориентации, а изображение 2 имеет тег ориентации, и вы выполняете выравнивание с помощью ORB (я не пробовал SIFT для этого) в OpenCV, выровненное изображение 2 будет отображаться с правильной ориентацией (ориентация Изображение 1) при открытии в приложении, которое читает тег EXIF Orientation. Однако если вы откроете оба изображения в приложении, которое игнорирует тег EXIF Orientation, они не будут иметь одинаковую ориентацию. Эта проблема становится еще более заметной, когда одно изображение имеет тег ориентации, а другое - нет.
Одно из возможных решений Удалите теги EXIF Orientation перед чтением изображений в OpenCV. Теперь, начиная с OpenCV 3.4 (может быть 3.3?), Есть возможность загружать изображения, игнорирующие тег, но когда это сделано, они загружаются в градациях серого (1 канал), что бесполезно, если вам НУЖЕН цвет cv.imread('image.jpg',128) где 128 означает "игнорировать ориентацию). Итак, я использую pyexiv2 в python, чтобы удалить неправильный тег EXIF Orientation из моих изображений:
import pyexiv2
image = path_to_image
imageMetadata = pyexiv2.ImageMetadata(image)
imageMetadata.read()
try:
del imageMetadata['Exif.Image.Orientation']
imageMetadata.write()
except:
continue