Сегментирование перекрывающихся толстых линий на двоичном изображении
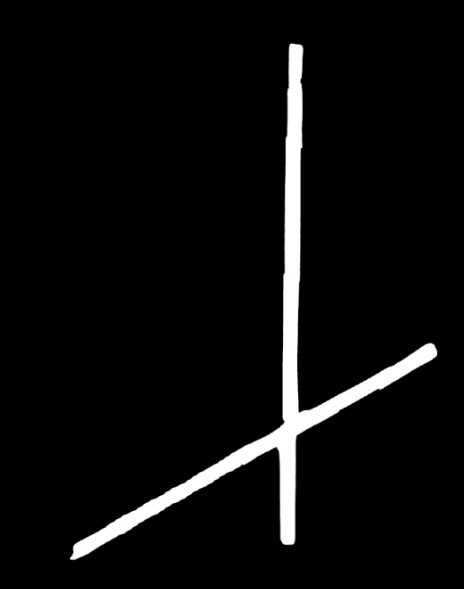
У меня есть двоичное изображение, как показано ниже, после применения различных конвейеров предварительной обработки и обнаружения к исходному изображению.
Как видно на картинке, на самом деле есть 2 взлетно-посадочные полосы (гудронированные дороги) для самолетов, которые пересекают друг друга в районе пересечения. Мне нужно разделить обе взлетно-посадочные полосы и вернуть их контуры. Я проверил функции opencv на предмет контуров, но мне не повезло.cv2.fitLineВроде нормально, но работает только в том случае, если на контуре есть только одна линия. Полученное изображение после применения масок должно выглядеть так:
2 ответа
Вот возможный подход, только что реализованный в Терминале с ImageMagick, но вы должны иметь возможность сделать почти то же самое в Python с помощью Wand или с помощью scikit-image и medial_axis.
Сначала сделайте каркас изображения:
magick runways.png -threshold 50% -morphology Thinning:-1 Skeleton skeleton.png
Затем запустите "Hough Line Detection", ища линии длиной более 130 пикселей, и запросите результаты в табличной форме:
magick skeleton.png -hough-lines 9x9+130 mvg:-
Выход
# Hough line transform: 9x9+130
viewbox 0 0 464 589
# x1,y1 x2,y2 # count angle distance
line 297.15,0 286.869,589 # 255 1 476
line 0,591.173 464,333.973 # 189 61 563
Это означает, что он обнаружил 2 строки:
- линия от координат 297,0 до координат 286,589, длиной =255 пикселей на 1 градус по вертикали
- линия от координат 0,591 до координат 464,333, длиной =189 пикселей под углом 61 градус к вертикали
Для иллюстрации я нарисую первый красным, а второй зеленым:
magick runways.png \
-fill red -draw "line 297,0 286,589" \
-fill lime -draw "line 0,591 464,333" result.png

Ключевые слова: Python, обработка изображений, каркас, каркас, прореживание, взлетно-посадочная полоса, взлетно-посадочные полосы, пересечение, обнаружение линии Хафа.
Я попытался решить вашу проблему с помощью C++, ссылаясь на свой старый ответ.
некоторые шаги:
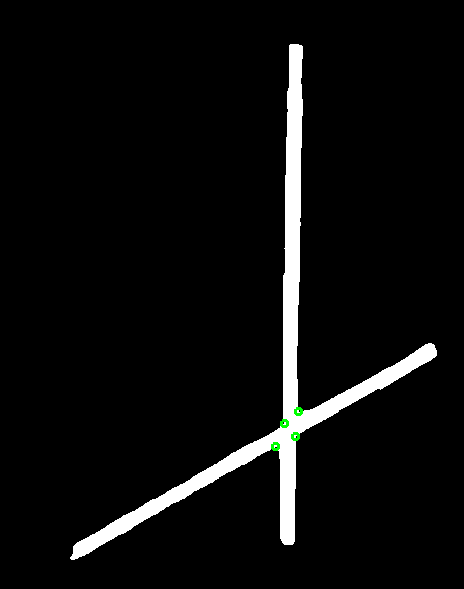
--after finding contours find defect points by convexityDefects
approxPolyDP(contours[i], contours[i], 9, true);
convexHull(contours[i], contoursHull, true);
convexityDefects(contours[i], contoursHull, defects);
создать две копии двоичного изображения и нарисовать линии, используя точки дефекта
Vec4i defpoint0 = defects[0];
Vec4i defpoint1 = defects[1];
Vec4i defpoint2 = defects[2];
Vec4i defpoint3 = defects[3];
line(bw0, contours[i][defpoint0[2]], contours[i][defpoint1[2]], Scalar(0), 2);
line(bw0, contours[i][defpoint2[2]], contours[i][defpoint3[2]], Scalar(0), 2);
line(bw1, contours[i][defpoint0[2]], contours[i][defpoint3[2]], Scalar(0), 2);
line(bw1, contours[i][defpoint1[2]], contours[i][defpoint2[2]], Scalar(0), 2);
найти контуры на изображениях и нарисовать их (я жестко запрограммировал индекс найденных контуров, необходимо улучшить)
findContours(bw0, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(src, contours, 1, Scalar((rand() & 255), (rand() & 255), (rand() & 255)), 2);
findContours(bw1, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(src, contours, 2, Scalar((rand() & 255), (rand() & 255), (rand() & 255)), 2);
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat src = imread("e:/test/crossing_lines.png");
if (src.empty())
return -1;
Mat bw,bw0,bw1;
cvtColor(src, bw, COLOR_BGR2GRAY);
bw = bw > 127;
bw0 = bw.clone();
bw1 = bw.clone();
// Find contours
vector<vector<Point> > contours;
vector<int> contoursHull;
vector<Vec4i> defects;
findContours(bw, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
for (size_t i = 0; i < contours.size(); i++)
{
if (contourArea(contours[i]) > 500)
{
approxPolyDP(contours[i], contours[i], 9, true);
convexHull(contours[i], contoursHull, true);
convexityDefects(contours[i], contoursHull, defects);
Vec4i defpoint0 = defects[0];
Vec4i defpoint1 = defects[1];
Vec4i defpoint2 = defects[2];
Vec4i defpoint3 = defects[3];
line(bw0, contours[i][defpoint0[2]], contours[i][defpoint1[2]], Scalar(0), 2);
line(bw0, contours[i][defpoint2[2]], contours[i][defpoint3[2]], Scalar(0), 2);
line(bw1, contours[i][defpoint0[2]], contours[i][defpoint3[2]], Scalar(0), 2);
line(bw1, contours[i][defpoint1[2]], contours[i][defpoint2[2]], Scalar(0), 2);
}
}
findContours(bw0, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(src, contours, 1, Scalar((rand() & 255), (rand() & 255), (rand() & 255)), 2);
findContours(bw1, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE);
drawContours(src, contours, 2, Scalar((rand() & 255), (rand() & 255), (rand() & 255)), 2);
imshow("src", src);
imshow("bw0", bw0);
imshow("bw1", bw1);
waitKey();
return 0;
}