Как использовать простую (не разреженную) модель GP и обновлять ее по одной точке данных за раз?
Я пытаюсь использовать гауссовские процессы в контексте проблемы регрессии, которая выполняется циклически. В каждом раунде поступает новый вход x, и модель GP делает прогноз y*. После того, как прогноз сделан, истинная истина раскрывается (y), и затем модель GP должна вычислить апостериорную, используя (x,y). Обратите внимание, что (x,y) - это всего лишь ОДИН образец, а также что модель не имеет доступа ко всему набору данных и должна выполняться циклами. Я хочу сделать это с помощью GPflow, но пока не могу. Я смотрел на это и SVGP, но мне это не кажется подходящим вариантом использования. Мне не нужна разреженная вариационная модель GP или какое-либо приближение, поскольку я имею дело с одним образцом за раз, и апостериорное обновление не будет трудноразрешимым. В основном мне нужна модель GP, которая обновляет апостериорное среднее значение, $m$ и апостериорную дисперсию $k$ следующим образом:
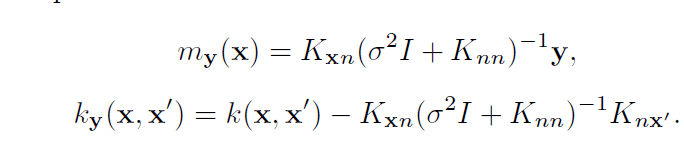
где y - число, а x - мой многомерный ввод (ОДИН ОБРАЗЕЦ).