Преобразование 2D-точки в 3D-местоположение
У меня фиксированная камера с известным cameraMatrix а также distCoeffs. Еще у меня есть шахматная доска, которая тоже закреплена, иtransform а также rotation вектор также рассчитывается с использованием solvePnP.
Мне интересно, как можно получить трехмерное местоположение двухмерной точки на той же плоскости, что и шахматная доска, как на картинке ниже:
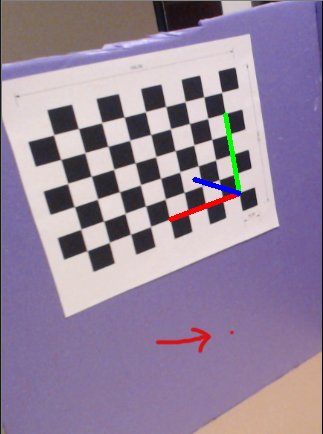
Одно можно сказать наверняка: Z этой точки равно 0, но как получить X и Y этой точки.
2 ответа
Вы можете решить эту проблему с помощью 3 простых шагов:
Шаг 1:
Вычислите трехмерный вектор направления, выраженный в координатной рамке камеры, луча, соответствующего данной точке двумерного изображения, путем инвертирования модели проекции камеры:
std::vector<cv::Point2f> imgPt = {{u,v}}; // Input image point
std::vector<cv::Point2f> normPt;
cv::undistortPoints (imgPt, normPt, cameraMatrix, distCoeffs);
cv::Matx31f ray_dir_cam(normPt[0].x, normPt[0].y, 1);
// 'ray_dir_cam' is the 3d direction of the ray in camera coordinate frame
// In camera coordinate frame, this ray originates from the camera center at (0,0,0)
Шаг 2:
Вычислите трехмерное направление вектора этого луча в системе координат, прикрепленной к шахматной доске, используя относительную позу между камерой и шахматной доской:
// solvePnP typically gives you 'rvec_cam_chessboard' and 'tvec_cam_chessboard'
// Inverse this pose to get the pose mapping camera coordinates to chessboard coordinates
cv::Matx33f R_cam_chessboard;
cv::Rodrigues(rvec_cam_chessboard, R_cam_chessboard);
cv::Matx33f R_chessboard_cam = R_cam_chessboard.t();
cv::Matx31f t_cam_chessboard = tvec_cam_chessboard;
cv::Matx31f pos_cam_wrt_chessboard = -R_chessboard_cam*t_cam_chessboard;
// Map the ray direction vector from camera coordinates to chessboard coordinates
cv::Matx31f ray_dir_chessboard = R_chessboard_cam * ray_dir_cam;
Шаг 3:
Найдите нужную трехмерную точку, вычислив пересечение трехмерного луча и плоскости шахматной доски с Z=0:
// Expressed in the coordinate frame of the chessboard, the ray originates from the
// 3d position of the camera center, i.e. 'pos_cam_wrt_chessboard', and its 3d
// direction vector is 'ray_dir_chessboard'
// Any point on this ray can be expressed parametrically using its depth 'd':
// P(d) = pos_cam_wrt_chessboard + d * ray_dir_chessboard
// To find the intersection between the ray and the plane of the chessboard, we
// compute the depth 'd' for which the Z coordinate of P(d) is equal to zero
float d_intersection = -pos_cam_wrt_chessboard.val[2]/ray_dir_chessboard.val[2];
cv::Matx31f intersection_point = pos_cam_wrt_chessboard + d_intersection * ray_dir_chessboard;
Поскольку ваш случай ограничен равнинами, самым простым способом является использование Homography.
Сначала отмените искажение вашего изображения. Затем используйте findHomography для вычисления матрицы гомографии, которая преобразует вашу пиксельную координату (изображение) в реальную координату (евклидово пространство, например, в см). Что-то похожее на это:
#include <opencv2/calib3d.hpp>
//...
//points on undistorted image (in pixel). more is better
vector<Point2f> src_points = { Point2f(123,321), Point2f(456,654), Point2f(789,987), Point2f(123,321) };
//points on chessboard (e.g. in cm)
vector<Point2f> dst_points = { Point2f(0, 0), Point2f(12.5, 0), Point2f(0, 16.5), Point2f(12.5, 16.5) };
Mat H = findHomography(src_points, dst_points, RANSAC);
//print euclidean coordinate of new point on undistorted image (in pixel)
cout << H * Mat(Point3d(125, 521, 0)) << endl;