Robotc - В поисках шаров
Я должен решить проблему с EV3, используя язык C с ROBOTC.
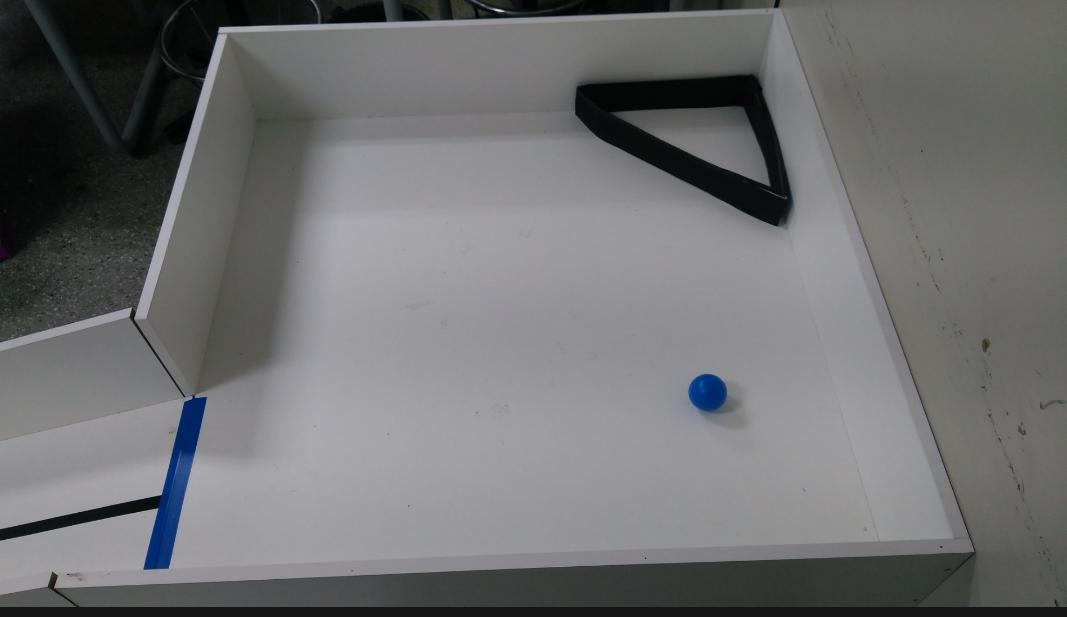
Я пытаюсь найти мяч в поле, схватить его и бросить в области треугольника. Я использую ультразвуковой датчик перед роботом.
Мое решение на данный момент:
Повернитесь на 360 градусов и найдите ближайший объект. Найдя мяч, я бы хотел уронить его в зарезервированную зону. Это нормально.
Большая проблема:
Как я могу различить шары с областью треугольника? После того, как я схватил мяч, мне нужно броситься в тринагла.
Как насчет стен? Как я могу дифференцироваться?
Шаги: Поверните 360 и найдите ближайший шар. Перейти к треугольнику. Брось это. Поверни 360 и найди ближайший мяч. И так далее.
Но с помощью звукового датчика я не могу различить, что такое площадь треугольника и шары.
Можете ли вы помочь мне лучшим способом?
Это следует за изображениями: