Сшивание двух изображений с помощью преобразования "Гомография" - преобразованное изображение обрезается
Сшивание изображений не работает должным образом. Деформированное изображение обрезается, и интерполяция не может быть выполнена, потому что изображения не пересекаются.
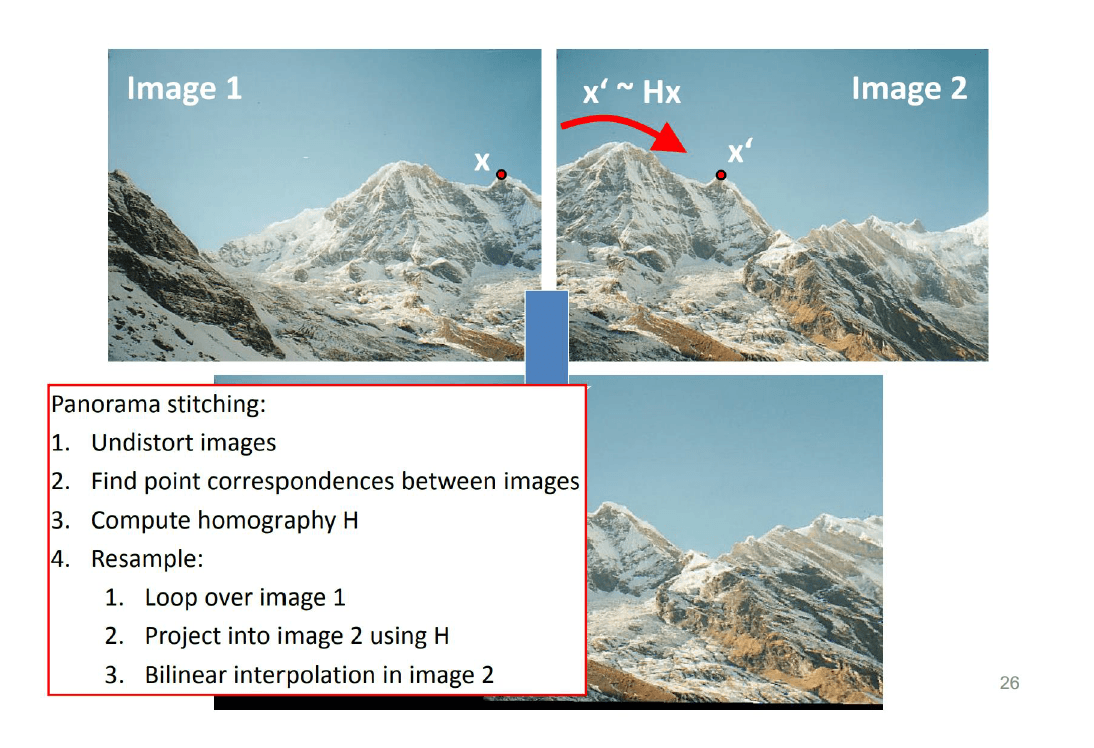
Привет, мне дали домашнее задание, в котором я должен сшить два изображения, снятые разными камерами. Я должен найти матрицу гомографии и затем деформировать второе изображение, используя эту матрицу. В конце я должен интерполировать два изображения.
К сожалению, код, который я написал, кажется, не работает должным образом. Во время второго искажения изображения я потерял большую часть информации об изображении; много пикселей черные, а не все преобразованное изображение преобразуется.
Я отслеживаю в двух изображениях по четыре пикселя в каждом порядке. Ниже вы можете найти фрагмент кода, который я написал.
# Globals
points = []
def show_and_fetch(image, title):
cv2.namedWindow(title, cv2.WINDOW_NORMAL)
cv2.setMouseCallback(title, mouse_callback)
# Show the image
cv2.imshow(title, image)
# Wait for user input to continue
cv2.waitKey(0)
cv2.destroyAllWindows()
# mouse callback function
def mouse_callback(event,x,y,flags,param):
if event == cv2.EVENT_LBUTTONDOWN:
points.append([x, y])
def stitching():
"""
This procedure stiches two images
:return:
"""
print "Stitching starts..."
###########################################################################
# Get input information
in_file_1 = utils.get_input(
"Insert 0 to exit, the path to the first image to stitch "
"or empty input to use default image: ", "string",
constants.default_stitching1)
in_file_2 = utils.get_input(
"Insert 0 to exit, the path to the second image to stitch "
"or empty input to use default image: ", "string",
constants.default_stitching2)
image_1 = utils.read_image(in_file_1)
image_2 = utils.read_image(in_file_2)
global points
show_and_fetch(image_1, "Image 1 to Stitch")
image_1_points = np.asarray(points, dtype=np.float32)
points = []
show_and_fetch(image_2, "Image 2 to Stitch")
image_2_points = np.asarray(points, dtype=np.float32)
matrix, mask = cv2.findHomography(image_1_points, image_2_points, cv2.RANSAC, 5)
image_1_warped = cv2.warpPerspective(image_1, matrix, dsize=image_1.shape[0:2])
utils.show_image_and_wait(image_1_warped, 'Image 1 warped', wait=False)
utils.show_image_and_wait(image_1, 'Image 1', wait=False)
utils.show_image_and_wait(image_2, 'Image 2')
if __name__ == "__main__":
stitching()
Я ожидаю, что деформированное изображение преобразуется, сохраняя большую часть информации в виде пикселей. Затем к интерполяции следует применить пересечение двух изображений, которые перекрываются в определенной области.
Например, я хочу интерполировать эти два изображения:
2 ответа
Мне удалось сшить изображения на основе этого решения. Вот результат сшивания:

Вот полный код:
import cv2
import imutils
import numpy as np
class Stitcher(object):
def __init__(self):
self.isv3 = imutils.is_cv3()
def stitch(self, images, ratio=0.75, reprojThresh=4.0, showMatches=False):
(imageB, imageA) = images
(kpsA, featuresA) = self.detectAndDescribe(imageA)
(kpsB, featuresB) = self.detectAndDescribe(imageB)
# match features between the two images
m = self.matchKeypoints(kpsA, kpsB, featuresA, featuresB, ratio, reprojThresh)
if not m:
return None
# otherwise, apply a perspective warp to stitch the images
# together
(matches, H, status) = m
result = cv2.warpPerspective(imageA, H,
(imageA.shape[1] + imageB.shape[1], imageA.shape[0]))
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageB
# check to see if the keypoint matches should be visualized
if showMatches:
vis = self.drawMatches(imageA, imageB, kpsA, kpsB, matches,
status)
# return a tuple of the stitched image and the
# visualization
return result, vis
# return the stitched image
return result
def detectAndDescribe(self, image):
# convert the image to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# check to see if we are using OpenCV 3.X
if self.isv3:
# detect and extract features from the image
descriptor = cv2.xfeatures2d.SIFT_create()
(kps, features) = descriptor.detectAndCompute(image, None)
# otherwise, we are using OpenCV 2.4.X
else:
# detect keypoints in the image
detector = cv2.xfeatures2d.SIFT_create()
kps = detector.detect(gray)
# extract features from the image
extractor = cv2.xfeatures2d.SIFT_create()
(kps, features) = extractor.compute(gray, kps)
# convert the keypoints from KeyPoint objects to NumPy
# arrays
kps = np.float32([kp.pt for kp in kps])
# return a tuple of keypoints and features
return kps, features
def matchKeypoints(self, kpsA, kpsB, featuresA, featuresB,
ratio, reprojThresh):
# compute the raw matches and initialize the list of actual
# matches
matcher = cv2.DescriptorMatcher_create("BruteForce")
rawMatches = matcher.knnMatch(featuresA, featuresB, 2)
matches = []
# loop over the raw matches
for m in rawMatches:
# ensure the distance is within a certain ratio of each
# other (i.e. Lowe's ratio test)
if len(m) == 2 and m[0].distance < m[1].distance * ratio:
matches.append((m[0].trainIdx, m[0].queryIdx))
# computing a homography requires at least 4 matches
if len(matches) > 4:
# construct the two sets of points
ptsA = np.float32([kpsA[i] for (_, i) in matches])
ptsB = np.float32([kpsB[i] for (i, _) in matches])
# compute the homography between the two sets of points
(H, status) = cv2.findHomography(ptsA, ptsB, cv2.RANSAC,
reprojThresh)
# return the matches along with the homograpy matrix
# and status of each matched point
return (matches, H, status)
# otherwise, no homograpy could be computed
return None
def drawMatches(self, imageA, imageB, kpsA, kpsB, matches, status):
# initialize the output visualization image
(hA, wA) = imageA.shape[:2]
(hB, wB) = imageB.shape[:2]
vis = np.zeros((max(hA, hB), wA + wB, 3), dtype="uint8")
vis[0:hA, 0:wA] = imageA
vis[0:hB, wA:] = imageB
# loop over the matches
for ((trainIdx, queryIdx), s) in zip(matches, status):
# only process the match if the keypoint was successfully
# matched
if s == 1:
# draw the match
ptA = (int(kpsA[queryIdx][0]), int(kpsA[queryIdx][1]))
ptB = (int(kpsB[trainIdx][0]) + wA, int(kpsB[trainIdx][1]))
cv2.line(vis, ptA, ptB, (0, 255, 0), 1)
# return the visualization
return vis
image1 = cv2.imread('image1.jpg')
image2 = cv2.imread('image2.jpg')
stitcher = Stitcher()
(result, vis) = stitcher.stitch([image1, image2], showMatches=True)
cv2.imwrite('result.jpg', result)
Я столкнулся с той же проблемой. Оказывается, порядок моих изображений был неправильным.
У меня было два изображения для сшивания. Нужно прошивать слева направо. Тем не менее, я вычислял преобразование, так как хочу, чтобы оно сшивалось справа.