Неверный переход скорости при попытке нормализовать сигнал в simulink
У меня есть сигнал в simulink, который я хочу нормализовать так, чтобы максимальное значение сигнала всегда было равно 1. Поэтому я использую MaxRunningResettable-Block, чтобы запомнить самое высокое значение, которое прошло до сих пор. Затем я делю сигнал на это значение.
Небольшой тест с блоком генерации сигнала, работающим перезагружаемым блоком, блоком деления и областью видимости проходит просто отлично. Но когда я добавляю эту нормализующую функцию в модель simulink, я получаю сообщение об ошибке: "Не удалось инициализировать модель - обнаружен недопустимый переход скорости с задержкой модуля"
Мне даже не нужно подключать маленький тестовый пример к моей другой модели. Просто помещая это в мою модель, я получаю эту ошибку. Странно, но блок RunningResettable становится желтым, когда я копирую его, что указывает на другую частоту дискретизации, я полагаю. Я не понимаю, почему это происходит. Я уже пытался добавить блок нулевого порядка удержания позади RunningResettable, но это не помогло.

Как и предполагалось, я попытался добавить еще один константный блок к R-входу RunningResettable-Block. Я пробовал несколько частот дискретизации для этого блока (-1, 0, 1/fAb), но это не помогло.
1 ответ
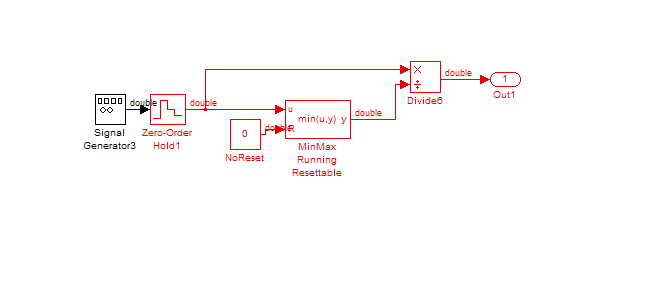
Хорошо, наконец, я думаю, что нашел свою неудачу. Кажется, что SignalGenerator выдает непрерывный сигнал (черный). Потому что в моей модели в основном дискретные сигналы, это как-то вызывает ошибки. Поэтому, когда я просто добавляю блок удержания нулевого порядка после генератора сигналов, все, кажется, работает просто отлично. Частота дискретизации удержания нулевого порядка должна быть отрегулирована для остальной части системы.