Обнаружение крестов на изображении
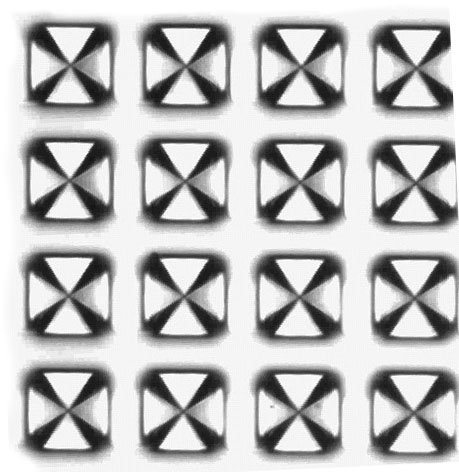
Я работаю над программой, чтобы обнаружить наконечники зондирующего устройства и проанализировать изменение цвета во время зондирования. Механизмы ввода / вывода более или менее на месте. То, что мне сейчас нужно, - это фактическое содержание вещей: определение подсказок.
На изображениях ниже подсказки находятся в центре крестов. Я думал о применении BFS к изображениям после некоторого порогового значения, но затем застрял и не знал, как поступить. Затем я обратился к OpenCV после прочтения, что он предлагает функцию обнаружения в изображениях. Тем не менее, я поражен огромным количеством концепций и методов, используемых здесь и снова, не зная, как поступить.
Я смотрю на это правильно? Можете ли вы дать мне несколько советов?
 Изображение извлечено из короткого видео
Изображение извлечено из короткого видео
 Двоичная версия с пороговым значением, установленным на 95
Двоичная версия с пороговым значением, установленным на 95
3 ответа
Подход к шаблонам
Вот простое решение matchTemplate, аналогичное подходу, который упоминает Гай Сиртон.
Сопоставление с шаблоном будет работать до тех пор, пока у вас не будет большого масштабирования или поворота с вашей целью.
Вот шаблон, который я использовал:
Вот код, который я использовал для обнаружения нескольких беспрепятственных крестов:
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char* argv[])
{
string inputName = "crosses.jpg";
string outputName = "crosses_detect.png";
Mat img = imread( inputName, 1);
Mat templ = imread( "crosses-template.jpg", 1);
int resultCols = img.cols - templ.cols + 1;
int resultRows = img.rows - templ.rows + 1;
Mat result( resultCols, resultRows, CV_32FC1 );
matchTemplate(img, templ, result, CV_TM_CCOEFF);
normalize(result, result, 0, 255.0, NORM_MINMAX, CV_8UC1, Mat());
Mat resultMask;
threshold(result, resultMask, 180.0, 255.0, THRESH_BINARY);
Mat temp = resultMask.clone();
vector< vector<Point> > contours;
findContours(temp, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE, Point(templ.cols / 2, templ.rows / 2));
vector< vector<Point> >::iterator i;
for(i = contours.begin(); i != contours.end(); i++)
{
Moments m = moments(*i, false);
Point2f centroid(m.m10 / m.m00, m.m01 / m.m00);
circle(img, centroid, 3, Scalar(0, 255, 0), 3);
}
imshow("img", img);
imshow("results", result);
imshow("resultMask", resultMask);
imwrite(outputName, img);
waitKey(0);
return 0;
}
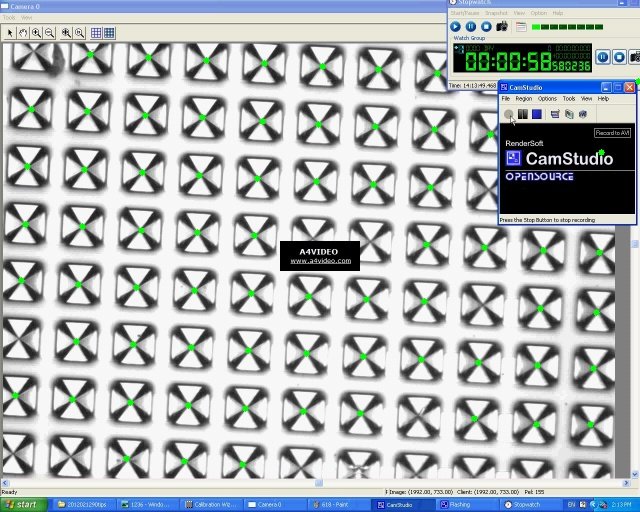
Это приводит к этому обнаружению изображения: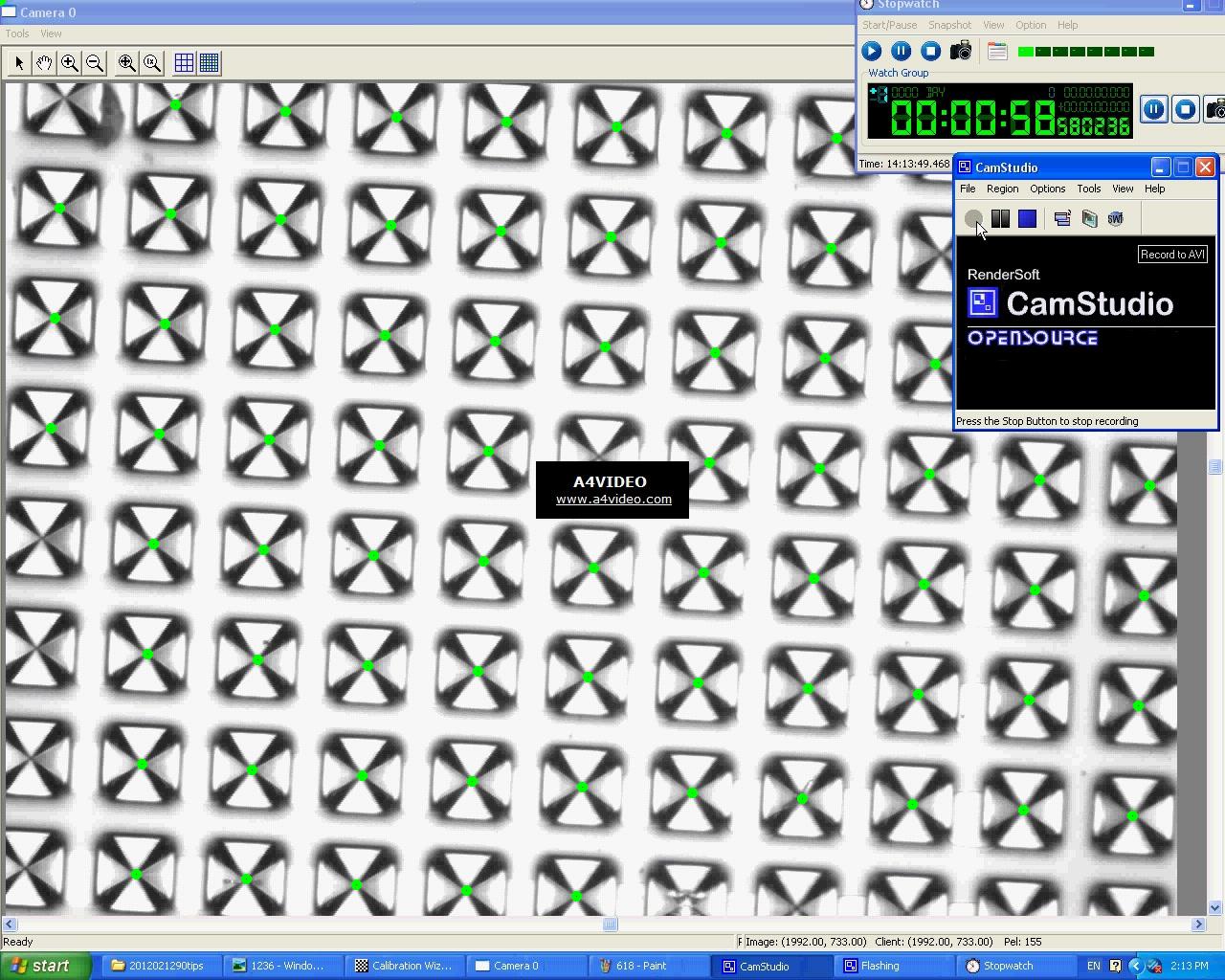
Этот код в основном устанавливает порог, чтобы отделить перекрестные пики от остальной части изображения, а затем обнаруживает все эти контуры. Наконец, он вычисляет центр тяжести каждого контура, чтобы определить центр креста.
Альтернатива обнаружения формы
Вот альтернативный подход с использованием обнаружения треугольника. Это не так точно, как matchTemplate подход, но может быть альтернативой, с которой вы могли бы поиграть.
С помощью findContours мы обнаруживаем все треугольники на изображении, что приводит к следующему:
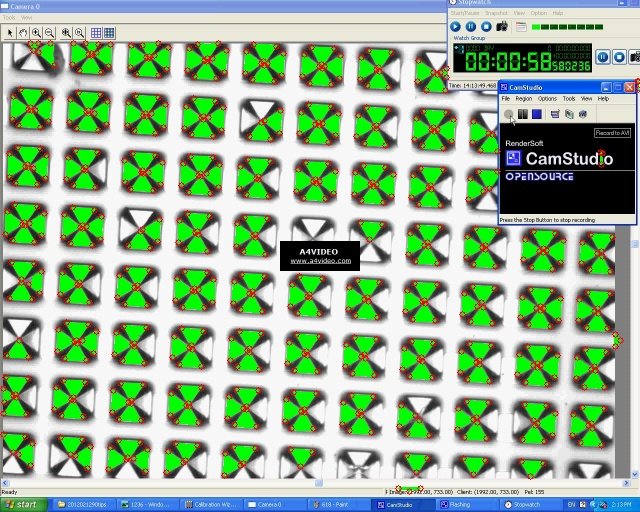
Затем я заметил, что все треугольные вершины кластеризуются вблизи центра пересечения, поэтому эти кластеры используются для центрирования точки пересечения, показанной ниже:
Наконец, вот код, который я использовал для этого:
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include <list>
using namespace cv;
using namespace std;
vector<Point> getAllTriangleVertices(Mat& img, const vector< vector<Point> >& contours);
double euclideanDist(Point a, Point b);
vector< vector<Point> > groupPointsWithinRadius(vector<Point>& points, double radius);
void printPointVector(const vector<Point>& points);
Point computeClusterAverage(const vector<Point>& cluster);
int main(int argc, char* argv[])
{
Mat img = imread("crosses.jpg", 1);
double resizeFactor = 0.5;
resize(img, img, Size(0, 0), resizeFactor, resizeFactor);
Mat momentImg = img.clone();
Mat gray;
cvtColor(img, gray, CV_BGR2GRAY);
adaptiveThreshold(gray, gray, 255.0, ADAPTIVE_THRESH_MEAN_C, THRESH_BINARY, 19, 15);
imshow("threshold", gray);
waitKey();
vector< vector<Point> > contours;
findContours(gray, contours, CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE);
vector<Point> allTriangleVertices = getAllTriangleVertices(img, contours);
imshow("img", img);
imwrite("shape_detect.jpg", img);
waitKey();
printPointVector(allTriangleVertices);
vector< vector<Point> > clusters = groupPointsWithinRadius(allTriangleVertices, 10.0*resizeFactor);
cout << "Number of clusters: " << clusters.size() << endl;
vector< vector<Point> >::iterator cluster;
for(cluster = clusters.begin(); cluster != clusters.end(); ++cluster)
{
printPointVector(*cluster);
Point clusterAvg = computeClusterAverage(*cluster);
circle(momentImg, clusterAvg, 3, Scalar(0, 255, 0), CV_FILLED);
}
imshow("momentImg", momentImg);
imwrite("centroids.jpg", momentImg);
waitKey();
return 0;
}
vector<Point> getAllTriangleVertices(Mat& img, const vector< vector<Point> >& contours)
{
vector<Point> approxTriangle;
vector<Point> allTriangleVertices;
for(size_t i = 0; i < contours.size(); i++)
{
approxPolyDP(contours[i], approxTriangle, arcLength(Mat(contours[i]), true)*0.05, true);
if(approxTriangle.size() == 3)
{
copy(approxTriangle.begin(), approxTriangle.end(), back_inserter(allTriangleVertices));
drawContours(img, contours, i, Scalar(0, 255, 0), CV_FILLED);
vector<Point>::iterator vertex;
for(vertex = approxTriangle.begin(); vertex != approxTriangle.end(); ++vertex)
{
circle(img, *vertex, 3, Scalar(0, 0, 255), 1);
}
}
}
return allTriangleVertices;
}
double euclideanDist(Point a, Point b)
{
Point c = a - b;
return cv::sqrt(c.x*c.x + c.y*c.y);
}
vector< vector<Point> > groupPointsWithinRadius(vector<Point>& points, double radius)
{
vector< vector<Point> > clusters;
vector<Point>::iterator i;
for(i = points.begin(); i != points.end();)
{
vector<Point> subCluster;
subCluster.push_back(*i);
vector<Point>::iterator j;
for(j = points.begin(); j != points.end(); )
{
if(j != i && euclideanDist(*i, *j) < radius)
{
subCluster.push_back(*j);
j = points.erase(j);
}
else
{
++j;
}
}
if(subCluster.size() > 1)
{
clusters.push_back(subCluster);
}
i = points.erase(i);
}
return clusters;
}
Point computeClusterAverage(const vector<Point>& cluster)
{
Point2d sum;
vector<Point>::const_iterator point;
for(point = cluster.begin(); point != cluster.end(); ++point)
{
sum.x += point->x;
sum.y += point->y;
}
sum.x /= (double)cluster.size();
sum.y /= (double)cluster.size();
return Point(cvRound(sum.x), cvRound(sum.y));
}
void printPointVector(const vector<Point>& points)
{
vector<Point>::const_iterator point;
for(point = points.begin(); point != points.end(); ++point)
{
cout << "(" << point->x << ", " << point->y << ")";
if(point + 1 != points.end())
{
cout << ", ";
}
}
cout << endl;
}
Я исправил несколько ошибок в моей предыдущей реализации и немного исправил код. Я также проверил это с различными факторами изменения размера, и это, казалось, работало довольно хорошо. Однако после того, как я достиг четвертой шкалы, у него начались проблемы с правильным определением треугольников, так что это может не сработать для очень маленьких скрещиваний. Кроме того, кажется, есть ошибка в moments функционировать как для некоторых допустимых кластеров, которые он возвращал (-NaN, -NaN) местоположений. Итак, я считаю, что точность немного улучшилась. Возможно, потребуется еще несколько настроек, но в целом я думаю, что это будет хорошей отправной точкой для вас.
Я думаю, что мое обнаружение треугольника работало бы лучше, если бы черная граница вокруг треугольников была немного толще / острее, и если было меньше теней на самих треугольниках.
Надеюсь, это поможет!
Как насчет простого определения автокорреляции, поскольку у вас есть хороший периодический шаблон в ваших изображениях.
Допустим, у вас есть целевое изображение:
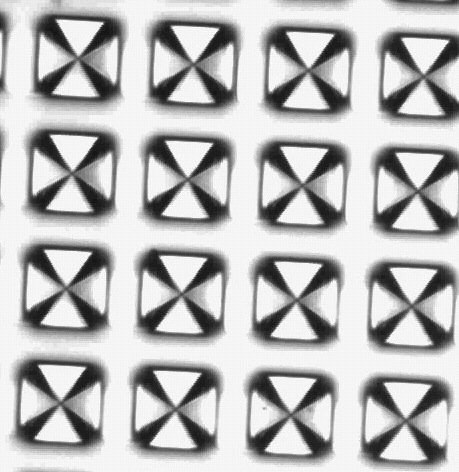
И шаблон изображения для синхронизации с
Вы можете определить автокорреляцию обоих:
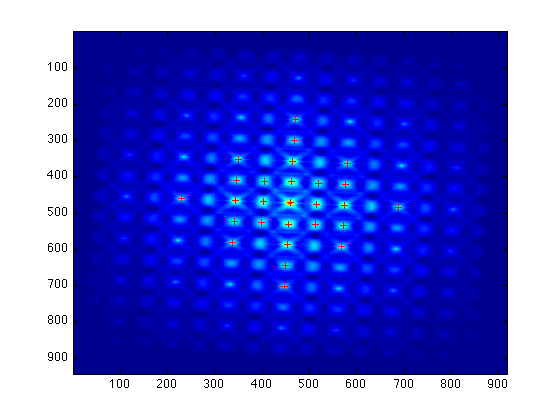
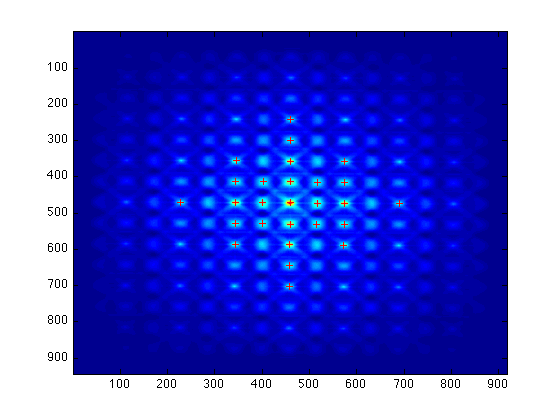
В обоих случаях вы можете обнаружить пики ACF, как в этом примере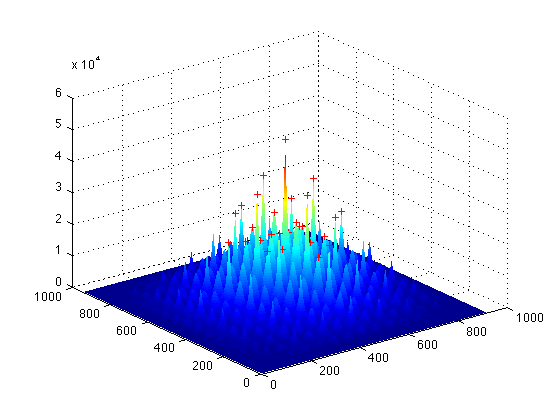
Эти пики вы можете сопоставить друг с другом, используя венгерский алгоритм. Здесь совпадение обозначено белой линией.
Это дает вам набор совпадающих 2D координат, которые, как мы надеемся, удовлетворяют соотношению:
x = Ax'
куда A матрица преобразования с масштабированием и вращением. Решение, таким образом, дает вам поворот и масштабирование между вашим шаблоном и целевым изображением. Затем можно установить перевод с помощью обычной взаимной корреляции с частично исправленным / исправленным изображением и шаблоном изображения.
В прошлом я использовал коммерческий инструмент под названием HexSight ( http://www.lmi3d.com/product/hexsight) в очень похожем приложении. Мы были очень довольны его производительностью и точностью.
Если вы ищете что-то очень грубое / базовое, вы можете попытаться вычислить взаимную корреляцию между опорным изображением и изображением, на которое вы смотрите. Альтернатива (которую использует HexSight) состоит в том, чтобы начать с некоторого алгоритма обнаружения краев, прежде чем пытаться найти совпадения с эталонным изображением. В любом случае вы можете использовать некоторый алгоритм уточнения, когда у вас есть приблизительный кандидат. Учитывая, что вы пытаетесь найти какой-то конкретный тип цели, вы можете применить эвристику или воспользоваться конкретной целью с помощью специального алгоритма.
Вот идея для пользовательского решения, предполагая, что кресты равномерно распределены по сетке, и изображение не слишком искажено:
- Суммируйте все строки и столбцы изображения. Это создаст пики между строками и столбцами крестиков (которые белого цвета).
- Определите поворот изображения путем поиска угла, который максимизирует ширину и амплитуду этих пиков. Вы можете выполнить бинарный поиск между +/- вашим максимальным ожидаемым углом.
- После того, как вы определили угол, теперь вы можете использовать центральные линии пиков, чтобы определить местоположение зондов. На самом деле у вас будет еще один узкий / меньший пик прямо вокруг центра целей.
Согласно предположениям, это должно быть достаточно надежным и точным, поскольку он использует информацию всего изображения. Он не будет слишком чувствительным к каким-либо локальным проблемам, он даже будет работать, если цель (или несколько) полностью отсутствует или скрыта.
Хорошая оптика и освещение - необходимые условия для получения высококачественных результатов из любой системы. Изображение, к которому вы привязываетесь, выглядит не очень хорошо.