Модель тензор потока не обновляет веса
У меня есть модель, которая тренируется (она проходит через этапы и эпохи и оценивает потери), но веса не тренируются.
Я пытаюсь тренировать дискриминатор, который бы различал, является ли изображение синтетическим или реальным. Это часть модели GAN, которую я пытаюсь построить.
Базовая структура выглядит следующим образом: 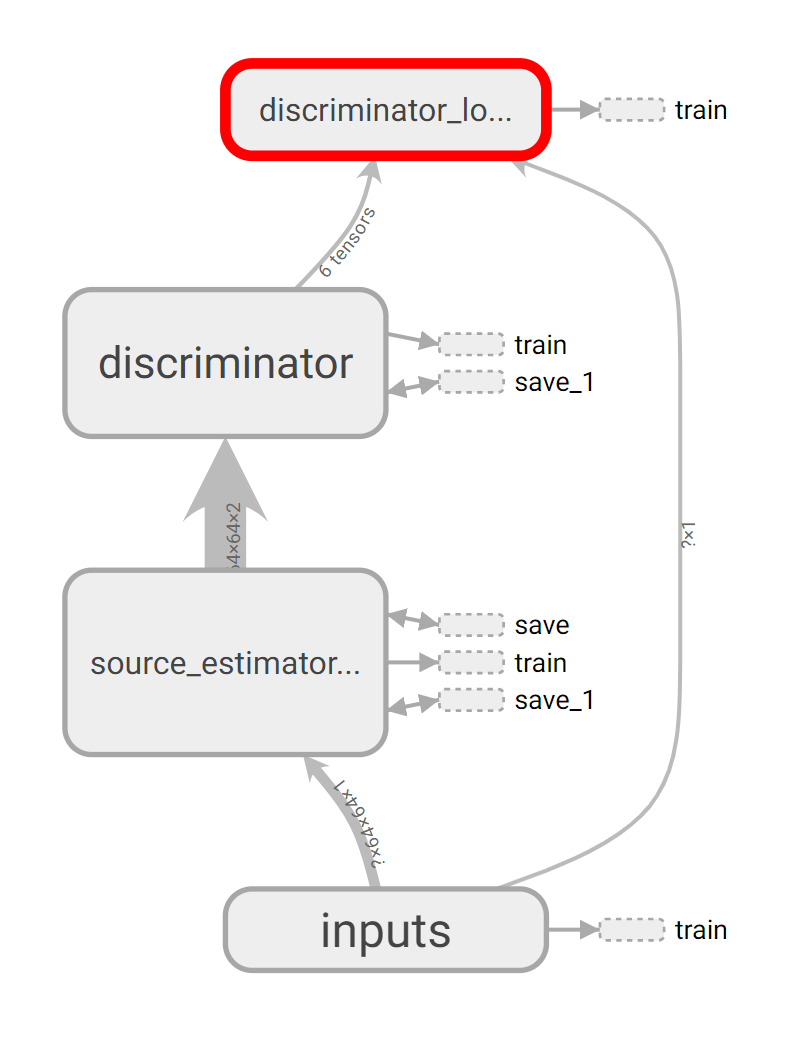
У меня есть два входа: 1. изображение (может быть реальным или синтетическим) 2. метки (0 для реального, 1 для синтетического)
Исходный Оценщик - то, где я извлекаю особенности из изображений. Я уже обучил модель и восстановил вес и уклоны. Эти слои заморожены (не обучаемы).
def SourceEstimator(eye, name, trainable = True):
# source estimator and target representer shares the same structure.
# SE is not trainable, while TR is.
net = tf.layers.conv2d(eye, 32, 3, (1,1), padding='same', activation=tf.nn.leaky_relu, trainable=trainable, name=name+'_conv2d_1')
net = tf.layers.conv2d(net, 32, 3, (1,1), padding='same', activation=tf.nn.leaky_relu, trainable=trainable, name=name+'_conv2d_2')
net = tf.layers.conv2d(net, 64, 3, (1,1), padding='same', activation=tf.nn.leaky_relu, trainable=trainable, name=name+'_conv2d_3')
c3 = net
net = tf.layers.max_pooling2d(net, 3, (2,2), padding='same', name=name+'_maxpool_4')
net = tf.layers.conv2d(net, 80, 3, (1,1), padding='same', activation=tf.nn.leaky_relu, trainable=trainable, name=name+'_conv2d_5')
net = tf.layers.conv2d(net, 192, 3, (1,1), padding='same', activation=tf.nn.leaky_relu, trainable=trainable, name=name+'_conv2d_6')
c5 = net
return (c3, c5)
Дискриминатор выглядит следующим образом:
def DiscriminatorModel(features, reuse=False):
with tf.variable_scope('discriminator', reuse=tf.AUTO_REUSE):
net = tf.layers.conv2d(features, 64, 3, 2, padding='same', kernel_initializer='truncated_normal', activation=tf.nn.leaky_relu, trainable=True, name='discriminator_c1')
net = tf.layers.conv2d(net, 128, 3, 2, padding='same', kernel_initializer='truncated_normal', activation=tf.nn.leaky_relu, trainable=True, name='discriminator_c2')
net = tf.layers.conv2d(net, 256, 3, 2, padding='same', kernel_initializer='truncated_normal', activation=tf.nn.leaky_relu, trainable=True, name='discriminator_c3')
net = tf.contrib.layers.flatten(net)
net = tf.layers.dense(net, units=1, activation=tf.nn.softmax, name='descriminator_out', trainable=True)
return net
Ввод идет в модель Source Estimator и извлекает функции (c3, c5).
Затем c3 и c5 объединяются вдоль оси канала и передаются в модель дискриминатора.
c3, c5 = CommonModel(self.left_eye, 'el', trainable=False)
c5 = tf.image.resize_images(c5, size=(self.config.img_size,self.config.img_size))
features = tf.concat([c3, c5], axis=3)
##---------------------------------------- DISCRIMINATOR ------------------------------------------##
with tf.variable_scope('discriminator'):
logit = DiscriminatorModel(features)
Наконец потери и train_ops
##---------------------------------------- LOSSES ------------------------------------------##
with tf.variable_scope("discriminator_losses"):
self.loss = tf.reduce_mean(tf.nn.sigmoid_cross_entropy_with_logits(logits=logit, labels=self.label))
##---------------------------------------- TRAIN ------------------------------------------##
# optimizers
update_ops = tf.get_collection(tf.GraphKeys.UPDATE_OPS)
with tf.control_dependencies(update_ops):
disc_optimizer = tf.train.AdamOptimizer(learning_rate = learning_rate)
self.disc_op = disc_optimizer.minimize(self.loss, global_step=self.global_step_tensor, name='disc_op')
Поезд шаги и эпохи. Я использую 32 размера партии. И класс генератора данных, чтобы получить изображение каждого шага.
def train_epoch(self):
num_iter_per_epoch = self.train_data.get_size() // self.config.get('batch_size')
loop = tqdm(range(num_iter_per_epoch))
for i in loop:
dloss = self.train_step(i)
loop.set_postfix(loss='{:05.3f}'.format(dloss))
def train_step(self, i):
el, label = self.train_data.get_batch(i)
## ------------------- train discriminator -------------------##
feed_dict = {
self.model.left_eye: el,
self.model.label: label
}
_, dloss = self.sess.run([self.model.disc_op, self.model.loss], feed_dict=feed_dict)
return dloss
Пока модель переживает этапы и эпохи, вес остается неизменным.
Потеря колеблется на этапах обучения, но потери для каждой эпохи одинаковы. Например, если я не буду перетасовывать набор данных каждую эпоху, потери на графике будут следовать одной и той же схеме в каждую эпоху.
Что, я думаю, означает, что модель распознает различные потери, но не обновляет параметры в соответствии с потерями.
Вот еще несколько вещей, которые я пробовал и не помогло:
- пробовал малую и большую скорость обучения (0,1 и 1е-8)
- пробовал со слоями Source Estimator обучаемыми ==True
- перевернутые метки (0 == синтетические, 1 == реальные)
- увеличены размеры ядра и фильтра в дискриминаторе.
Я застрял на этой проблеме некоторое время, мне действительно нужно немного понимания. Заранее спасибо.
------ РЕДАКТИРОВАТЬ 1-----
def initialize_uninitialized(sess):
global_vars = tf.global_variables()
is_initialized= sess.run([tf.is_variable_initialized(var) for var in global_vars])
not_initialized_vars = [v for (v, f) in zip(global_vars, is_initialized) if not f]
# for var in not_initialized_vars: # only for testing
# print(var.name)
if len(not_initialized_vars):
sess.run(tf.variables_initializer(not_initialized_vars))
self.sess = tf.Session()
## inbetween here I create data generator, model and restore pretrained model.
self.initilize_uninitialized(self.sess)
for current_epoch in range(self.model.current_epoch_tensor.eval(self.sess), self.config.num_epochs, 1)
self.train_epoch() # included above
self.sess.run(self.model.increment_current_epoch_tensor)
2 ответа
Я вижу, что вы вызываете функцию minim, а также функцию потерь в session.run(). Вы должны вызывать только функцию minimal (). т.е. только self.model.disc_op, который будет внутренне вызывать функцию потерь. Кроме того, я нигде не вижу ваш вызов инициализации сеанса. Следите за тем, чтобы его вызывали только один раз.
Глядя на ваш обновленный код, я вижу, что вы приравниваете вызов tf.is_variable_initialized() к is_not_initialized. Таким образом, он инициализирует те переменные, которые уже инициализированы.
Мне так и не удалось выяснить, что не так с кодом.
Мой коллега предложил попробовать ту же модель в другой изолированной среде, поэтому я переписал код с помощью библиотеки Keras.
И теперь это работает.:/
Мы до сих пор не знаем, что именно не так с кодом выше - я ничего не менял. Я даже использовал один и тот же код для переноса веса и инициализации переменной.
Если кто-нибудь сталкивается с подобной проблемой, я бы предложил попробовать ту же модель в другой среде.
Или, если кто-то знает, что случилось с кодом выше, поделитесь!