Матричный перевод
Я пытаюсь использовать функцию createTranslation для перевода вектора. Это должно пройти тест на жасмин.
мой матричный объект:
/*global it, describe, expect, Vector, Matrix*/
/// <reference path="../js/vector.js"/>
/// <reference path="../js/matrix.js"/>
/// <reference path="../Scripts/jasmine.js"/>
var Matrix = (function () {
function Matrix(pX0, pX1, pX2, pY0, pY1, pY2, pZ0, pZ1, pZ2) {
this.matrix = [
[pX0, pX1, pX2],
[pY0, pY1, pY2],
[pZ0, pZ1, pZ2]
];
}
Matrix.prototype.getX0 = function () {
return this.mX0;
};
Matrix.prototype.setX0 = function (pX0) {
this.mX0 = pX0;
};
Matrix.prototype.getX1 = function () {
return this.mX1;
};
Matrix.prototype.setX1 = function (pX1) {
this.mX1 = pX1;
};
Matrix.prototype.getX2 = function () {
return this.mX2;
};
Matrix.prototype.setX2 = function (pX2) {
this.mX2 = pX2;
};
Matrix.prototype.getY0 = function () {
return this.mY0;
};
Matrix.prototype.setY0 = function (pY0) {
this.mY0 = pY0;
};
Matrix.prototype.getY1 = function () {
return this.mY1;
};
Matrix.prototype.setY1 = function (pY1) {
this.mY1 = pY1;
};
Matrix.prototype.getY2 = function () {
return this.mY2;
};
Matrix.prototype.setY2 = function (pY2) {
this.mY2 = pY2;
};
Matrix.prototype.getZ0 = function () {
return this.mZ0;
};
Matrix.prototype.setZ0 = function (pZ0) {
this.mZ0 = pZ0;
};
Matrix.prototype.getZ1 = function () {
return this.mZ0;
};
Matrix.prototype.setZ1 = function (pZ1) {
this.mZ1 = pZ1;
};
Matrix.prototype.getZ2 = function () {
return this.mZ2;
};
Matrix.prototype.setZ2 = function (pZ2) {
this.mZ2 = pZ2;
};
Matrix.prototype.getElement = function (pRow, pColumn) {
return this.matrix[pRow][pColumn];
};
Matrix.createIdentity = function () {
return new Matrix(1, 0, 0, 0, 1, 0, 0, 0, 1);
};
Matrix.createTranslation = function (translationVector) {
return new Matrix(1, 0, translationVector.getX(),
0, 1, translationVector.getY(), 0, 0, 1);
};
Matrix.createScale = function (scaleVector) {
return new Matrix(scaleVector.getX(), 0, 0,
0, scaleVector.getY(), 0, 0, 0, 1);
};
Matrix.createRotation = function (rotation) {
return new Matrix(Math.cos(rotation), -Math.sin(rotation), 0,
Math.sin(rotation), Math.cos(rotation), 0, 0, 0, 1);
};
Matrix.prototype.multiplyVector = function (vector) {
vector = new Vector();
return new Vector(this.getX0() * vector.getX(),
this.getX1() * vector.getY(), this.getX2() * vector.getZ(),
this.getY0() * vector.getX(),
this.getY1() * vector.getY(), this.getY2() * vector.getZ(),
this.getZ0() * vector.getX(),
this.getZ1() * vector.getY(), this.getZ2() * vector.getZ());
};
Matrix.prototype.multiply = function (secMatrix) {
secMatrix = this.matrix();
return new Matrix(this.getX0 * secMatrix.getX0,
this.getX1 * secMatrix.getY0,
this.getX2 * secMatrix.getZ0,
this.getY0 * secMatrix.getX1,
this.getY1 * secMatrix.getY1,
this.getY2 * secMatrix.getZ1,
this.getZ0 * secMatrix.getX2,
this.getZ1 * secMatrix.getY2,
this.getZ2 * secMatrix.getZ2);
};
//Matrix.prototype.multiplyVector = function (translationVector,
//secondVector, vector) {
// return new Vector(this.getX0 * Matrix.createTranslation(translationVector),
// this.getX1 * Matrix.createTranslation(translationVector),
// this.getX2 * Matrix.createTranslation(translationVector),
// this.getY0 * Matrix.createTranslation(translationVector),
// this.getY1 * Matrix.createTranslation(translationVector),
// this.getY2 * Matrix.createTranslation(translationVector),
// this.getZ0 * Matrix.createTranslation(translationVector),
// this.getZ1 * Matrix.createTranslation(translationVector),
// this.getZ2 * Matrix.createTranslation(translationVector));
//};
Matrix.prototype.multiplyVectors = function (translationVector,
vector, secondVector) {
return new Vector(vector.getX() * Matrix.createTranslation(translationVector),
vector.getY() * Matrix.createTranslation(translationVector),
vector.getZ() * Matrix.createTranslation(translationVector),
secondVector = this.multiplyVector(vector));
};
//Matrix.prototype.multiply = function () {
// return new Matrix();
//};
return Matrix;
}());
Комментируемые части я пытаюсь разными способами добиться этого.
Этот объект должен пройти следующий тест.
describe("Multiply vector", function () {
describe("Translation", function () {
var vector, translationVector, matrix, secondVector;
vector = new Vector(30, 40, 1);
translationVector = new Vector(10, 20, 1);
matrix = Matrix.createTranslation(translationVector);
secondVector = matrix.multiplyVector(vector);
it("X Set", function () {
expect(secondVector.getX()).toEqual(40);
});
it("Y Set", function () {
expect(secondVector.getY()).toEqual(60);
});
it("Z Set", function () {
expect(secondVector.getZ()).toEqual(1);
});
});
describe("Rotation", function () {
var vector, rotation, matrix, secondVector;
vector = new Vector(30, 40, 1);
rotation = Math.PI / 2;
matrix = Matrix.createRotation(rotation);
secondVector = matrix.multiplyVector(vector);
it("X Set", function () {
expect(secondVector.getX()).toBeCloseTo(-40, 1);
});
it("Y Set", function () {
expect(secondVector.getY()).toBeCloseTo(30, 1);
});
it("Z Set", function () {
expect(secondVector.getZ()).toBeCloseTo(1, 1);
});
});
describe("Scale", function () {
var vector, scaleVector, matrix, secondVector;
vector = new Vector(30, 40, 1);
scaleVector = new Vector(2, 2, 1);
matrix = Matrix.createScale(scaleVector);
secondVector = matrix.multiplyVector(vector);
it("X Set", function () {
expect(secondVector.getX()).toEqual(60);
});
it("Y Set", function () {
expect(secondVector.getY()).toEqual(80);
});
it("Z Set", function () {
expect(secondVector.getZ()).toEqual(1);
});
});
});
Есть и другие тесты на вращение, но как только я выясню это, остальные последуют.
Я немного застрял в этом, так как не уверен в том, что мне нужно делать, создавать ли мне больше функций для каждого перевода, вращения, масштабирования или возможно ли все это использовать в функции multiplyVector?
РЕДАКТИРОВАТЬ:
Matrix.prototype.multiplyVector = function (translationVector) {
return new Vector(Matrix.createTranslation().getX0 * translationVector.getX() +
Matrix.createTranslation().getX1 * translationVector.getY() +
Matrix.createTranslation().getX2 * translationVector.getZ(),
Matrix.createTranslation().getY0 * translationVector.getX() +
Matrix.createTranslation().getY1 * translationVector.getY() +
Matrix.createTranslation().getY2 * translationVector.getZ(),
Matrix.createTranslation().getZ0 * translationVector.getX() +
Matrix.createTranslation().getZ1 * translationVector.getY() +
Matrix.createTranslation().getZ2 * translationVector.getZ());
};
Я пытался сделать это таким образом, но все равно это не работает.
1 ответ
Вы находитесь на правильном пути с кодом в вашем редактировании, но, как я сказал в комментариях, матрица, которую вы умножаете на вектор, уже содержит информацию о преобразовании. Вам не только не нужно генерировать его снова, но это изменит данные преобразования до такой степени, что вы получите неправильный вывод.
Ресурс, предоставленный qxz:
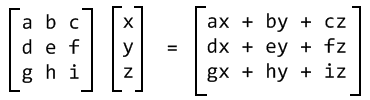
правильный способ умножить матрицу на вектор столбца. Чтобы реализовать это в коде, вы делаете следующее:
Matrix.prototype.multiplyVector = function(vector) {
return new Vector(
this.getX0() * vector.getX() + this.getX1() * vector.getY() + this.getX2() * vector.getZ(),
this.getY0() * vector.getX() + this.getY1() * vector.getY() + this.getY2() * vector.getZ(),
this.getZ0() * vector.getX() + this.getZ1() * vector.getY() + this.getZ2() * vector.getZ()
);
}