Lego Robot для сбора мячей для настольного тенниса
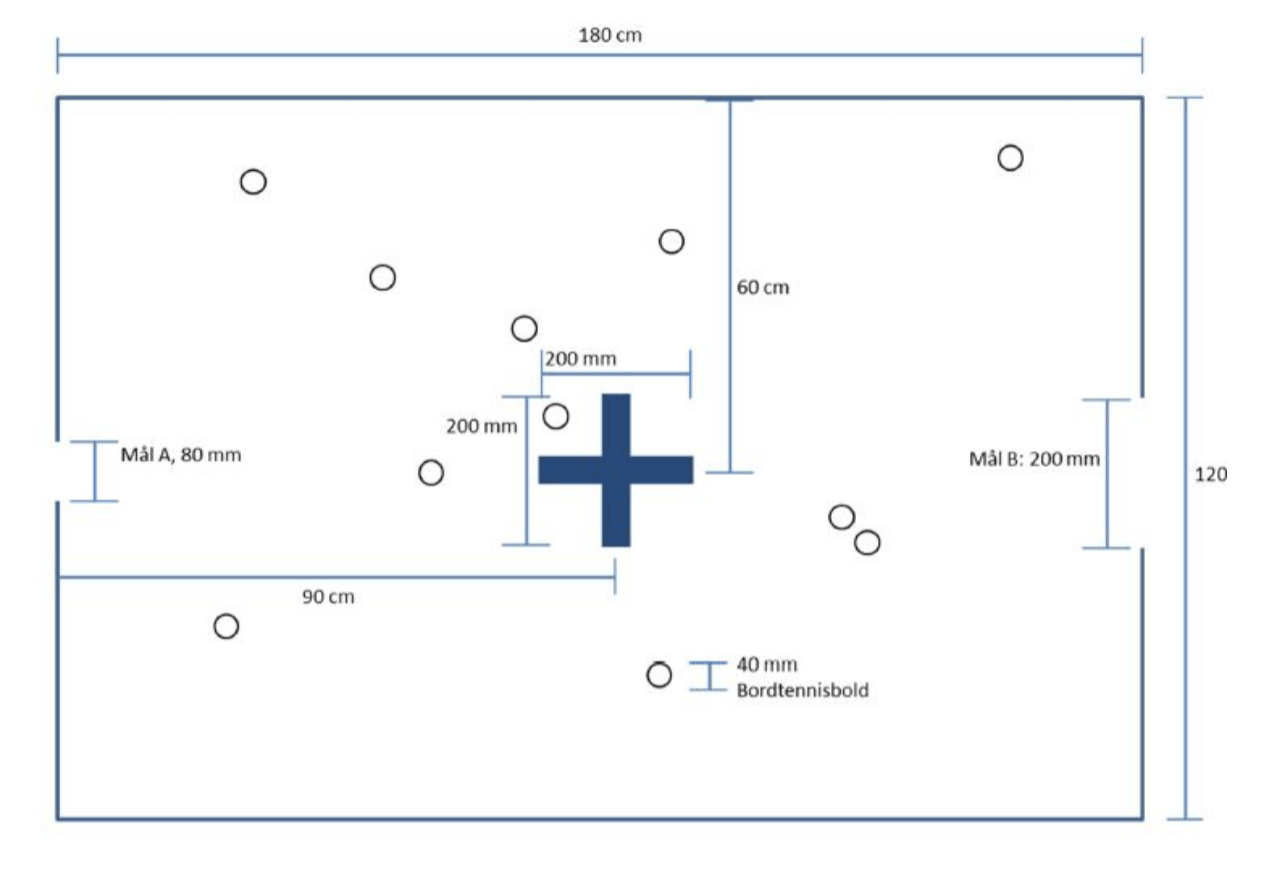
У меня есть цель построить робота, который сможет собирать мячи для настольного тенниса и помещать их в цели A и B, которые видны слева и справа от добавленной картинки. Для информации, курс является прямоугольным с одним препятствием; четырехстенный крест.
На данный момент я купил Pixy 2, чтобы распознать шары, которые нужно собрать.
Мои два вопроса:
- Является ли Lego Mindstorm (LM) простым / разумным языком программирования для решения этой проблемы, и может ли LM также легко контролировать движения робота?
- Можно ли использовать Java вместо LM для решения этой проблемы? (Это было бы предпочтительным, так как я знаю Java, но не LM)
2 ответа
Как я понимаю, LM не является языком программирования, и вы можете использовать несколько программных комплектов для развертывания программы на LM. Некоторые из них основаны на Java.
- Язык программирования Lego Mindstorm по умолчанию является визуальным / на основе блоков. Он предназначен для детей без опыта программирования. Итак, если вы знаете Java, у вас не будет проблем с его использованием. На самом деле вы найдете это слишком просто.
Программирование движения робота очень просто, и это пример проекта из набора Mindstorm.
Плюс: ваша камера поставляется с плагинами для добавления своего блока в среду программирования Mindstorms. У вас даже есть пример проекта по созданию робота-охотника. - Из моего опыта (с Mindstorms NXT2) попытка использовать LeJOS() не была простой. Но это было несколько лет назад, с более старой версией, которую вы указали в тегах (
ev3).