Обнаружение и отображение количества игроков, обнаруженных с помощью Kinect
Я пытаюсь отобразить количество игроков, обнаруженных датчиком Kinect, с помощью приложения WPF. В дополнение к отображению количества игроков я также раскрасил пиксели в зависимости от их расстояния от Kinect. Первоначальная цель состояла в том, чтобы измерить расстояние между пикселями и отобразить расстояние, но я также хотел бы показать, сколько людей в кадре. Вот фрагменты кода, которые я использую сейчас.
PS Я заимствовал идею от THIS учебник, и я использую SDK 1.8 с XBOX 360 Kinect (1414)
private void _sensor_AllFramesReady(object sender, AllFramesReadyEventArgs e)
{
using (DepthImageFrame depthFrame = e.OpenDepthImageFrame())
{
if (depthFrame==null)
{
return;
}
byte[] pixels = GenerateColoredBytes(depthFrame);
int stride = depthFrame.Width * 4;
image.Source = BitmapSource.Create(depthFrame.Width, depthFrame.Height,
96, 96, PixelFormats.Bgr32, null, pixels, stride);
}
}
private byte[] GenerateColoredBytes(DepthImageFrame depthFrame)
{
//get the raw data from kinect with the depth for every pixel
short[] rawDepthData = new short[depthFrame.PixelDataLength];
depthFrame.CopyPixelDataTo(rawDepthData);
/*
Use depthFrame to create the image to display on screen
depthFrame contains color information for all pixels in image
*/
//Height * Width *4 (Red, Green, Blue, Empty byte)
Byte[] pixels = new byte[depthFrame.Height * depthFrame.Width * 4];
//Hardcoded loactions for Blue, Green, Red (BGR) index positions
const int BlueIndex = 0;
const int GreenIndex = 1;
const int RedIndex = 2;
//Looping through all distances and picking a RGB colour based on distance
for (int depthIndex = 0, colorIndex = 0;
depthIndex < rawDepthData.Length &&
colorIndex<pixels.Length; depthIndex++, colorIndex+=4)
{
//Getting player
int player = rawDepthData[depthIndex] & DepthImageFrame.PlayerIndexBitmask;
//Getting depth value
int depth =rawDepthData[depthIndex]>>DepthImageFrame.PlayerIndexBitmaskWidth;
//.9M or 2.95'
if (depth <=900 )
{
//Close distance
pixels[colorIndex + BlueIndex] = 0;
pixels[colorIndex + GreenIndex] = 0;
pixels[colorIndex + RedIndex] = 255;
//textBox.Text = "Close Object";
}
//.9M - 2M OR 2.95' - 6.56'
else if (depth >900 && depth<2000)
{
//Bit further away
pixels[colorIndex + BlueIndex] = 255;
pixels[colorIndex + GreenIndex] = 0;
pixels[colorIndex + RedIndex] = 0;
}
else if (depth > 2000)
{
//Far away
pixels[colorIndex + BlueIndex] = 0;
pixels[colorIndex + GreenIndex] = 255;
pixels[colorIndex + RedIndex] = 0;
}
//Coloring all people in Gold
if (player > 0)
{
pixels[colorIndex + BlueIndex] = Colors.Gold.B;
pixels[colorIndex + GreenIndex] = Colors.Gold.G;
pixels[colorIndex + RedIndex] = Colors.Gold.R;
playersValue.Text = player.ToString();
}
}
return pixels;
}
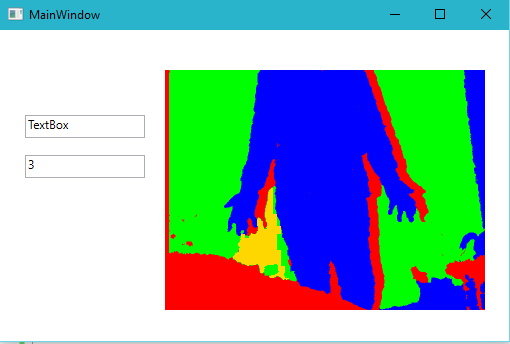
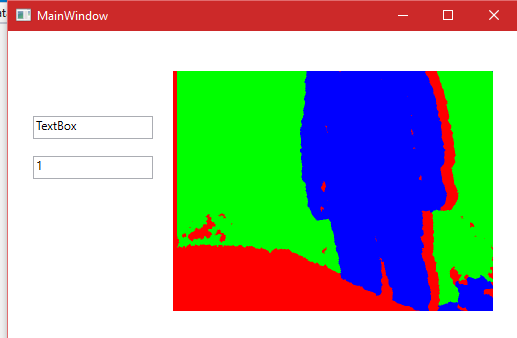
Текущая цель -
- Определить общее количество обнаруженных игроков и отобразить их в виде
textBox - Цвет их в соответствии с логикой расстояния, т.е.
depth <=900 is red,
С помощью текущего кода я могу определить игрока и раскрасить его в золото, но как только игрок будет обнаружен, image зависает и когда игрок выходит из кадра image размораживается и действует нормально. Это из-за петли? Идеи, рекомендации, рекомендации и критика приветствуются.
Спасибо!
Скриншоты:
1 ответ
Получить статическую переменную внутри кода формы
Затем установите эту переменную, используя процедуру видеокадра (не определяйте ее там).
А затем обновите представление текстового поля, вероятно, в вашем _sensor_AllFramesReady. Поскольку прибытие новых кадров выполняется в другом потоке, я не вижу весь код, возможно, для обновления, вызовите textbox.show
хотя основной цикл выглядит немного странно, слишком сложный. в основном вы используете его, чтобы закрасить каждый пиксель в вашем изображении. так как kinect360 имеет 320x240 пикселей, что делает массив глубины размером 76800. Вы можете просто создать 2 для следующих циклов циклов для X и Y, а затем внутри этого цикла увеличить переменную, чтобы выбрать правильное значение глубины.