Как определить системы LTI с задержкой по времени в Scipy?
Передаточная функция системы LTI с временной задержкой имеет числовой член exp(-Td * s), где Td - временная задержка. В Matlab такую систему LTI можно создать разными способами (например, с помощью оператора "s" и установкой экспоненциального члена непосредственно или установкой inputdelayoutputdelay свойства tf объекты.) Однако, я не могу найти какой-либо способ сделать это в объектах Scipy Signal LTI. Я также проверил библиотеку систем управления Python, но так и не смог найти способ.
Я не хочу использовать приближение Паде для временной задержки и хочу установить точную задержку для системы LTI.
Кто-нибудь знает, как добиться этого в Scipy или в любой другой внешней библиотеке Python?
1 ответ
Я проверил модуль ltisys на github и попытался создать класс LTI с временной задержкой. Я думаю, было бы просто ввести задержку времени ввода в уравнение состояния, если мы заменим BU(t) на BU(t-Td), где Td - задержка времени. Следующий подход работает для системы с одним входом и одним выходом. Не может быть свободен от ошибок, но это решило мою цель.
#Inherit the parent LTI class to create LTI class with time delay
class ltidelay(lti):
def __init__(self,inputdelay,*args,**kwargs):
super(ltidelay,self).__init__(*args,**kwargs)
self.d =inputdelay
#define a method to simulate LTI with time delay . just copied lsim2 and made 2 changes. 1. passed the delay from the `ltidelay` object and 2. modified the state equation.
def lsim3(system , U=None, T=None,X0=None, **kwargs):
if isinstance(system,lti):
sys = system
else:
sys = lti(*system)
delay = sys.d
if X0 is None:
X0 = zeros(sys.B.shape[0],sys.A.dtype)
if T is None:
T = linspace(0,10,101)
T = atleast_1d(T)
if len(T.shape) != 1:
raise ValueError("T must be a rank1 array")
if U is not None:
U = atleast_1d(U)
if len(U.shape)==1:
U=U.reshape(-1,1)
sU = U.shape
if sU[0] != len(T):
raise ValueError("U must have the same number of rows as elements in T")
if sU[1] != sys.inputs:
raise ValueError("The number of inputs in U is not compatible")
ufunc = interpolate.interp1d(T, U, kind ='linear',axis =0,bounds_error =False)
def fprime(x,t,sys,ufunc):
return dot(sys.A,x)+squeeze(dot(sys.B,nan_to_num(ufunc([t-delay]))))
xout = odeint(fprime,X0,T,args=(sys,ufunc),**kwargs)
yout = dot(sys.C,transpose(xout))
else:
def fprime(x,t,sys):
return dot(sys.A,x)
xout = odeint(fprime,X0,T,args=(sys,),**kwargs)
yout = dot(sys.C, transpose(xout))
return T , squeeze(transpose(yout)),xout
#create an LTI system with delay 10
tf = ltidelay(10,2,[4,1])
#create a step signal and time vector to simulate the LTI and check
u = linspace(0,0,100)
u[50:100] = 1
t = linspace(1,100,100)
#check the simulation
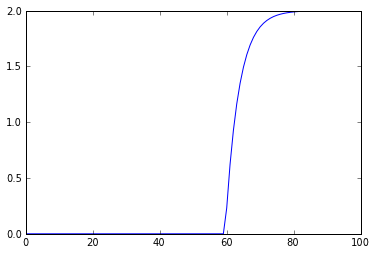
y = lsim3(tf,u,t,X0 =0)
plot(y[1])
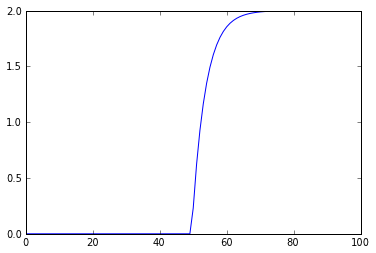
# compare with LTI without time delay
y1 =lsim2(tf, u,t, X0=0)
plot(y1[1])
#delay works