Simulink: ПИД-регулятор - разница между обратным расчетом и фиксацией для защиты от затухания?
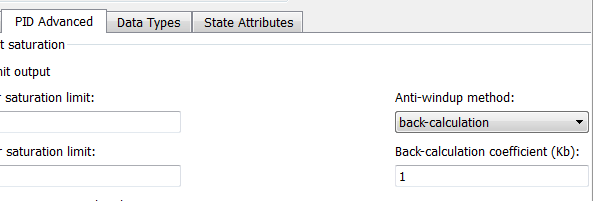
Мне нужно реализовать анти-windup (ограничение выхода) для моего ПИД-регулятора. Simulink предлагает два варианта: back calculation а также clamping ( документация), которые, кажется, дают равные результаты. Я знаю, что подсчет делает математически. Требуется определить усиление обратного расчета Kb, Это усиление зависит от того, как долго насыщается мой контроллер, поэтому на самом деле это динамическое значение (потому что у меня может быть большое изменение времени насыщения). Вы видите способ контролировать это значение? (в этом случае, вероятно, будет необходимо создать мой собственный ПИД-контроллер, как показано в документации выше или на рисунке ниже.

Что подводит меня к вопросу, что такое clamping на самом деле делать? И каковы другие различия? Какой из них быстрее, какой более устойчив к крутым склонам? У кого-нибудь есть опыт использования обоих?
2 ответа
Не уверен, что это полностью отвечает на вопрос, но страница документации PID-контроллера объясняет немного больше о зажиме:
clampingОстанавливает интеграцию, когда сумма компонентов блока превышает пределы выхода, а выход интегратора и вход блока имеют одинаковый знак. Возобновляет интегрирование, когда сумма компонентов блока превышает пределы выхода, а выход интегратора и вход блока имеют противоположный знак. Интеграторная часть блока:

Схема зажима реализует логику, необходимую для определения того, продолжается ли интеграция.
Если вы выберете вариант зажима и посмотрите под маской, вы, вероятно, сможете увидеть детали схемы зажима.
В дополнение к ответу am304 есть еще несколько вещей, которые следует учитывать.
Зажимные
Зажим всегда будет работать. Он обнаруживает переполнение интегратора и устанавливает нулевой интегральный путь ПИД-регулятора, чтобы избежать смещения с помощью простого переключателя.
Зажим является общепринятым методом против перегрузки, особенно в случае цифровых систем управления. В серьезных приложениях, однако, есть также прямое ограничение, оценивающее также вход контроллера. Этот механизм должен быть реализован мной вручную.
Обратный расчет
Обратный расчет сильно зависит от обратного расчетаKb, Если вы не знаете, как на самом деле рассчитать параметр Kb не используйте обратный расчет. Этот метод вычисляет разницу между фактическим выходом контроллера и насыщенным выходом и вычитает его из тракта I-Gain, усиленного Kb, В большинстве случаев значение по умолчанию Kb = 1 приведет к худшим результатам, чем зажатие, даже возможно, что это не повлияет вообще. Kb следует рассчитывать на основе времени выборки или в случае использования D-Gain на основе D- и I-Gain. Нужно консультироваться с соответствующим литератором, чтобы рассчитать коэффициент. Обратный расчет с правильно установленным коэффициентом обеспечивает лучшую динамику, чем прижим!