Модель NuSMV - AND
Я пытаюсь написать следующую модель в NuSMV
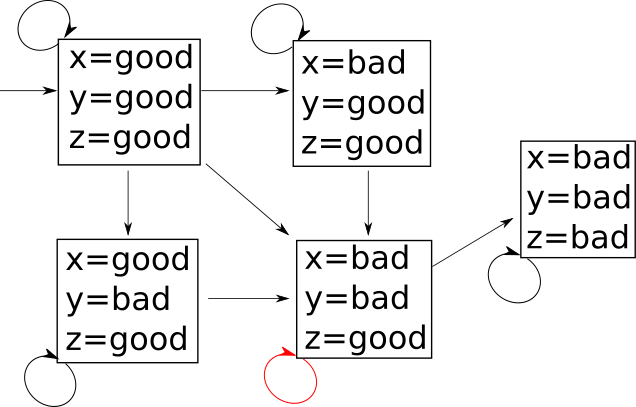
Другими словами, z становится плохим только тогда, когда x и y также находятся в плохом состоянии. Это код, который я написал
MODULE singleton
VAR state: {good, bad};
INIT state = good
TRANS (state = good) -> next(state) = bad
TRANS (state = bad) -> next(state) = bad
MODULE effect(cond)
VAR state: {good, bad};
ASSIGN
init(state) := good;
next(state) := case
(state = bad) : bad;
(state = good & cond) : bad;
(!cond) : good;
TRUE : state;
esac;
MODULE main
VAR x : singleton;
VAR y : singleton;
VAR z : effect((x.state = bad) & (y.state = bad));
Но я получил только эти достижимые состояния
NuSMV > print_reachable_states -v
######################################################################
system diameter: 3
reachable states: 3 (2^1.58496) out of 8 (2^3)
------- State 1 ------
x.state = good
y.state = good
z.state = good
------- State 2 ------
x.state = bad
y.state = bad
z.state = bad
------- State 3 ------
x.state = bad
y.state = bad
z.state = good
-------------------------
######################################################################
Как я могу изменить свой код, чтобы получить также
x.state = good
y.state = bad
z.state = good
x.state = bad
y.state = good
z.state = good
в достижимых штатах?
Кроме того, я не уверен, должен ли я добавить или нет ту красную стрелку, напечатанную на рисунке модели: если x и y находятся в плохом состоянии, я хочу, чтобы наверняка рано или поздно z тоже стало плохим.
Большое спасибо за помощь!
1 ответ
Штаты
x.state = good
y.state = bad
z.state = good
x.state = bad
y.state = good
z.state = good
недоступны, потому что каждый подмодуль main выполняет переход одновременно с другими, и потому что вы инициируете детерминированный переход для ваших переменных состояния; то есть в вашей модели оба x а также y изменить состояние с good в bad в то же время. Более того, в отличие от вашей красивой картинки, ваш smv В коде не допускается какой-либо цикл за исключением цикла в конечном состоянии.
Чтобы исправить вашу модель, вам нужно только указать, что - в случае x (Соотв. y) является good-- ты хочешь next(x) (Соотв. next(y)) быть либо good или же bad, но не насильственное решение. например
MODULE singleton
VAR
state: { good, bad };
ASSIGN
init(state) := good;
next(state) := case
state = good : { good, bad };
TRUE : bad;
esac;
MODULE effect(cond)
VAR
state: { good, bad };
ASSIGN
init(state) := good;
next(state) := case
(state = bad | cond) : bad;
TRUE : state;
esac;
MODULE main
VAR
x : singleton;
y : singleton;
z : effect((x.state = bad) & (y.state = bad));
примечание: я также упростил правила для модуляeffectхотя это было ненужным.
Вы можете проверить модель следующим образом:
nuXmv > reset; read_model -i test.smv ; go; print_reachable_states -v
######################################################################
system diameter: 3
reachable states: 5 (2^2.32193) out of 8 (2^3)
------- State 1 ------
x.state = good
y.state = bad
z.state = good
------- State 2 ------
x.state = good
y.state = good
z.state = good
------- State 3 ------
x.state = bad
y.state = good
z.state = good
------- State 4 ------
x.state = bad
y.state = bad
z.state = bad
------- State 5 ------
x.state = bad
y.state = bad
z.state = good
-------------------------
######################################################################
Что касается вашего второго вопроса, пример кода, который я вам предоставил, гарантирует собственность, которую вы хотите проверить:
nuXmv > check_ltlspec -p "G ((x.state = bad & y.state = bad) -> F z.state = bad)"
-- specification G ((x.state = bad & y.state = bad) -> F z.state = bad) is true
Это, очевидно, так, потому что самоконтроль, обведенный красным краем на вашей картинке, отсутствует. Если вы подумаете об этом, этот переход позволил бы по крайней мере одно выполнение, в котором текущее состояние остается равным
x.state = bad
y.state = bad
z.state = good
на неопределенный срок, и это будет контрпример к вашей спецификации.
РЕДАКТИРОВАТЬ:
Вы также можете исправить код, просто написав это:
MODULE singleton
VAR state: {good, bad};
INIT state = good
TRANS (state = bad) -> next(state) = bad
Удаление линии TRANS (state = good) -> next(state) = bad позволяет x а также y изменить произвольно, когда state = goodЭто означает, что они могут оставаться недетерминированными good или стать bad, Это полностью эквивалентно предоставленному мною коду, хотя на первый взгляд менее понятно, поскольку скрывает недетерминизм под капотом, а не делает его явным.